Intelligent Ship Course Controller Based on Incompletely Recursively Supported Dynamic Neural Network
A dynamic neural network, intelligent controller technology, applied in adaptive control, general control system, control/regulation system, etc., can solve the problem of lack of effective control, and achieve improved control effect, high control accuracy, and ship heading switching. Control process for fast effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0035] The invention discloses an intelligent ship heading controller based on an incomplete recursive support dynamic neural network, which includes sequentially connected input conversion devices, steering gear controllers, and neural network controllers, such as figure 1 shown; the input of the entire intelligent controller includes the actual heading angle y of the ship at time τ p (τ), the external disturbance d(τ) of sea wind and waves, and the expected course angle y d ; The output is the control quantity u(τ) of the ship.
[0036] An intelligent ship heading controller based on incomplete recursive support dynamic neural network, including sequentially connected input conversion device, steering gear controller, and neural network controller;
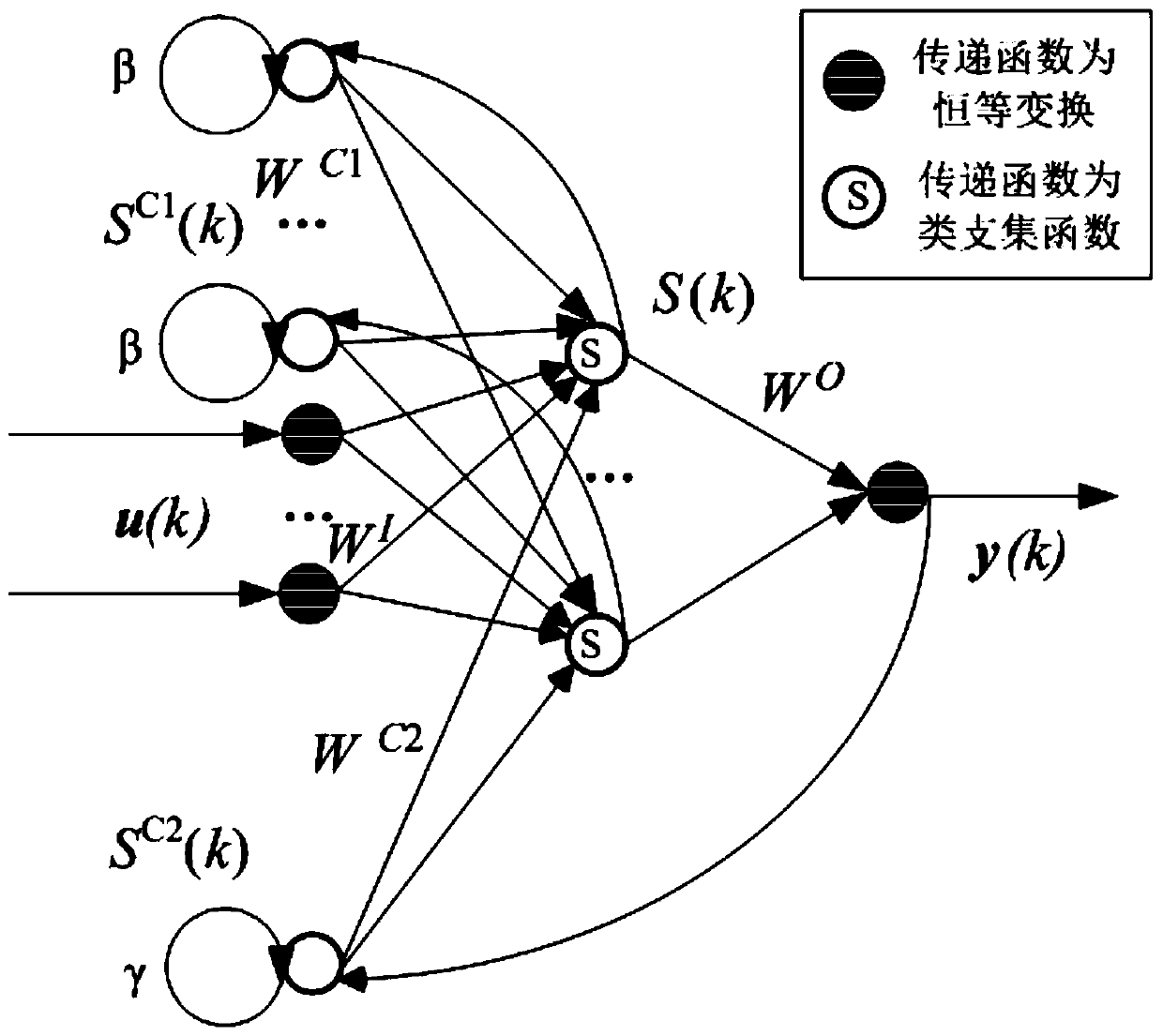
[0037] In the neural network controller, an incomplete recursive support dynamic neural network is established, and the construction method of the network includes:
[0038] On the basis of the local regression neural network,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com