Ship course active disturbance rejection controller
An active disturbance rejection controller and heading technology, which is applied in the direction of steering and steering with rudder, can solve the problems of ship motion uncertainty, application range and control effect difficult to meet the requirements of ship intelligence, and buffeting in variable structure control. , to achieve the effect of fast ship heading switching control process, high-precision ship heading maintaining control, and small steering amount
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
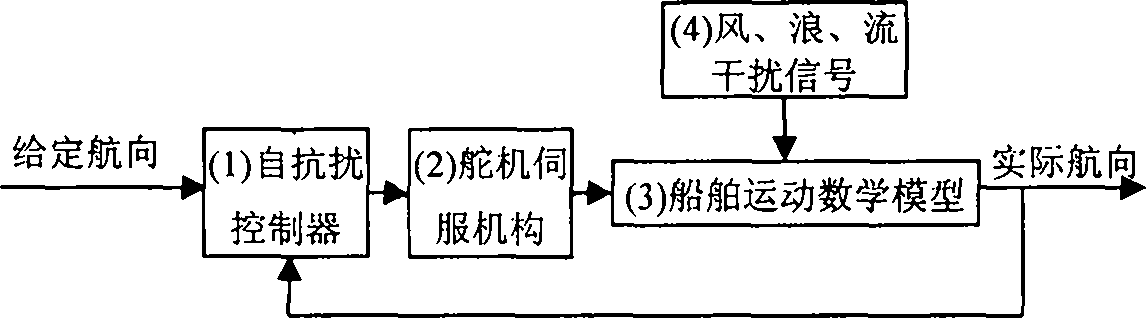
[0016] A ship course active disturbance rejection controller, see figure 1 , the system is composed of ADRC controller (1), steering gear servo mechanism (2), ship motion mathematical model (3), wind, wave and current interference signal (4); the input terminal of said ADRC controller Comparing the received heading setting signal with the actual heading signal, after being processed by the ADRC, the output end is connected to the input end of the steering gear servo mechanism, and the output control signal is transmitted; the output end of the steering gear servo mechanism is connected to the input of the ship motion mathematical model terminal; the actual course output terminal is connected to the ADRC input terminal.
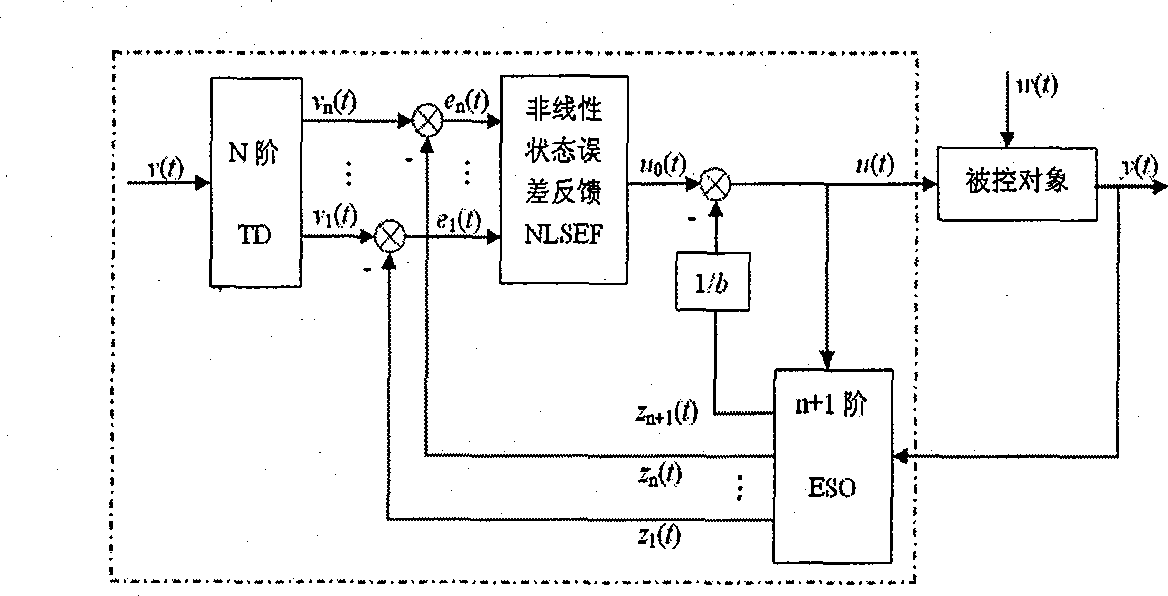
[0017] ADRC(1), see figure 2 , consists of three components: TD (Tracking Differentiator), ESO (Extended State Observer) and NLSEF (Nonlinear State Error Feedback); among them, the given heading signal is connected to the TD input terminal, and the transitio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com