Laser radar three-dimensional imaging method based on indoor four-rotor aircraft
A four-rotor aircraft and three-dimensional imaging technology, which is applied in the field of three-dimensional imaging, can solve problems such as the inability to realize three-dimensional imaging in all directions, complex use of three-dimensional imaging methods, etc., achieve high adaptability, expand the area range, and improve the effect of scanning range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
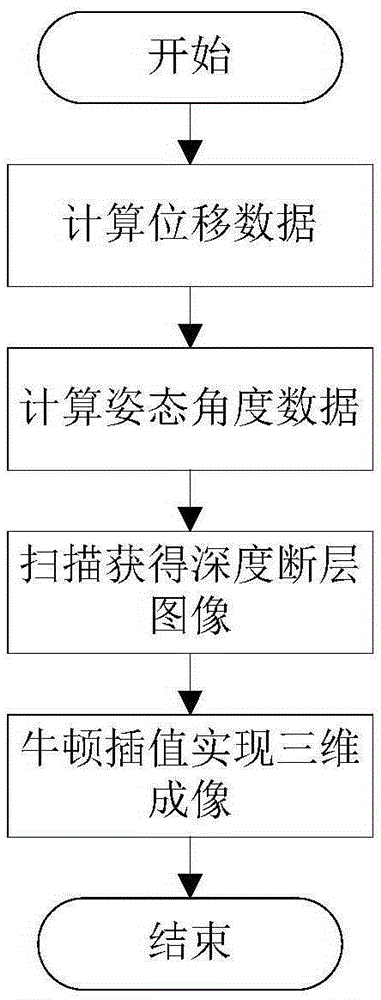
[0060] Such as figure 1 As shown, the lidar three-dimensional imaging method based on the indoor quadrotor aircraft of the present invention comprises the following steps:
[0061] Step 1, read the acceleration data measured by the inertial navigation system of the quadrotor aircraft and the distance data measured by the ranging system, and then use the complementary filtering method to perform data fusion on the acceleration data and the distance data, thereby obtaining the displacement data of the quadrotor aircraft, specific steps for:
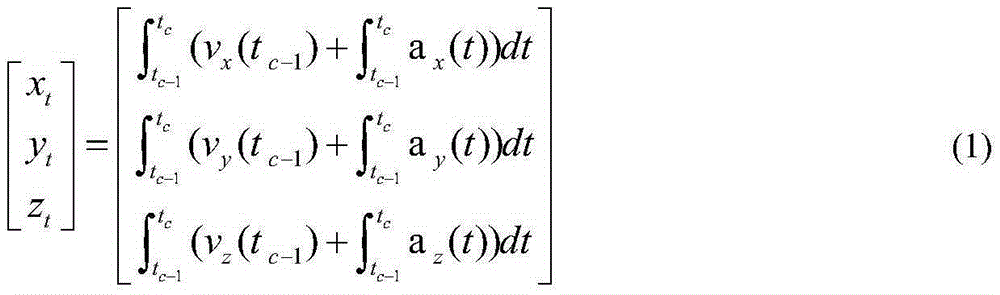
[0062] Step 1.1, the acceleration data read is (a x (t),a y (t),a z (t)), perform double integral to get t c-1 to t c Approximate displacement at time (x t ,y t ,z t )for:
[0063] x t y t z ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com