An Active Vibration Isolation Control Method for Stewart Platform Based on Backstepping Sliding Mode Technology
A back-step sliding mode and control method technology, applied in the aerospace field, can solve the problems of no high-frequency modal analysis, the vibration attenuation time needs to be improved, etc., and achieve the effects of high interference suppression capability, good robustness, and high control accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
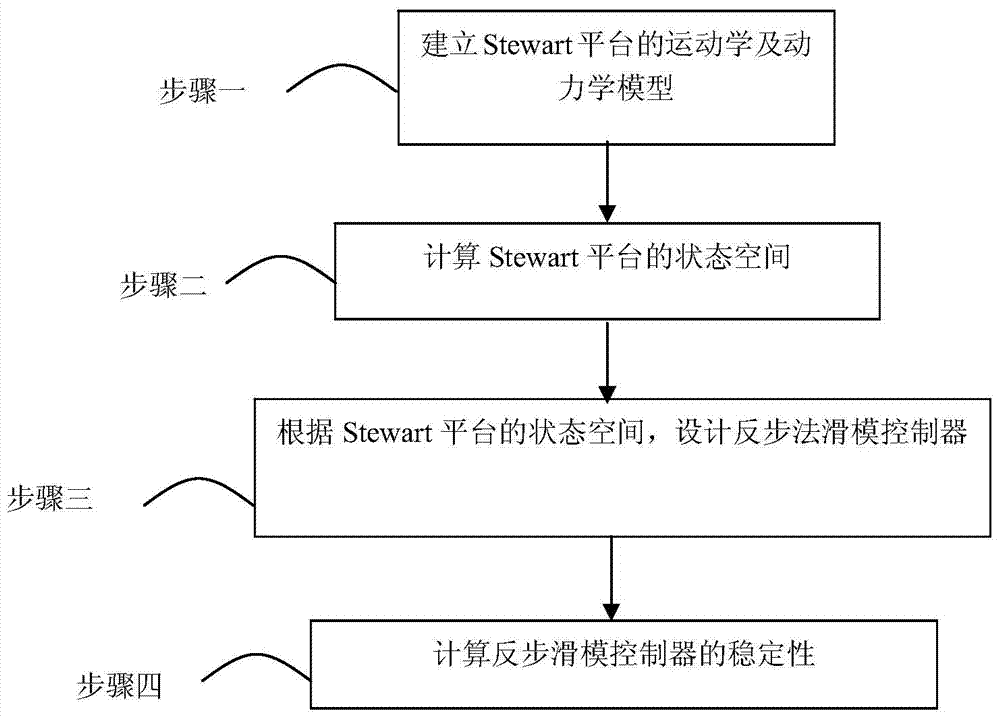
[0035] Specific embodiment one: a kind of Stewart platform active vibration isolation control method based on backstepping sliding mode technology of the present embodiment, concrete steps are as follows:
[0036] Step 1: Establish the kinematics and dynamics model of the Stewart platform;
[0037]Step 2: Calculate the state space of the Stewart platform;
[0038] Step 3: Design a backstepping sliding mode controller according to the state space of the Stewart platform;
[0039] According to the state space of the Stewart platform, the backstepping sliding mode controller is designed as follows:
[0040]
[0041] Among them, u=[u 1 ,u 2 ,...,u 6 ] T ,u i (i=1,...,6) is the control law, that is, the expression of the backstepping sliding mode controller, B∈R 6×6 is the damping matrix of the Stewart platform, A represents the coefficient matrix of the platform, x=[x 1 ,x 2 ,x 3 ] T ,x 1 =χ, χ represents the generalized position vector of the upper platform; s is...
specific Embodiment approach 2
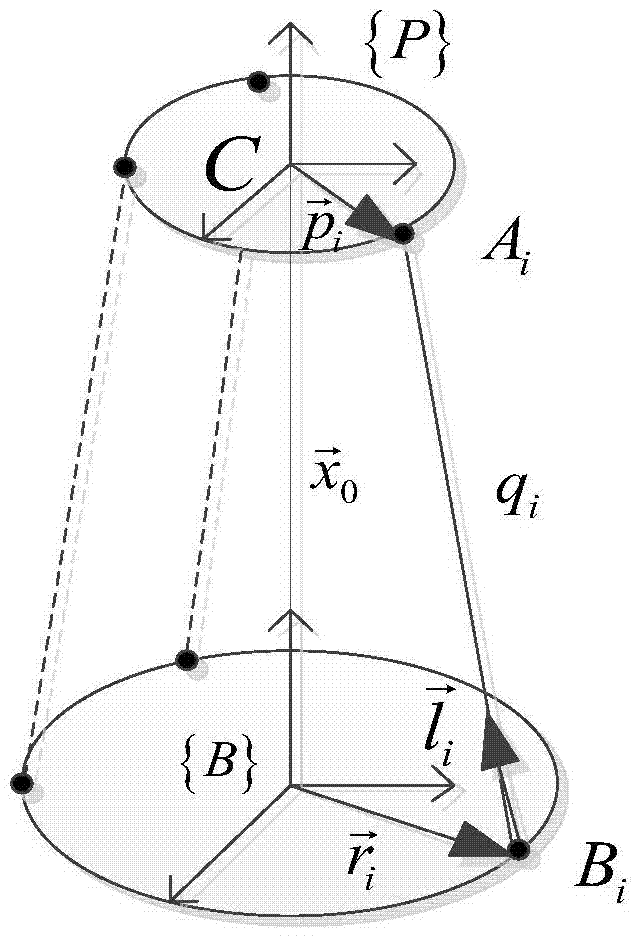
[0051] Specific embodiment two: this embodiment is different from specific embodiment one, described a kind of Stewart platform active vibration isolation control method based on backstepping sliding mode technology, it is characterized in that described step one establishes the kinematics of vibration isolation platform and a kinetic model:
[0052] The connection point between the upper platform of the Stewart platform and the 6 poles is the end device A i , i=1, 2, 3, the connection point between the lower platform and the 6 poles is B i , i=1, 2, 3; {B} is the inertial reference coordinate system fixedly connected to the lower platform, the origin of {B} coincides with the center of mass of the lower platform, {P} is the reference coordinate system of the moving platform; r base is the origin of {B} to the base connection point B i The radial distance of r end is the origin of {P} to the base connection point A i radial distance;
[0053] The transformation matrix exp...
specific Embodiment approach 3
[0095] Specific embodiment three: this embodiment is different from specific embodiment one or two, described a kind of Stewart platform active vibration isolation control method based on backstepping sliding mode technology, it is characterized in that described step 2 calculates the state of Stewart platform space:
[0096] According to the formula (20) as make x 1 = x, The state space representation of the Stewart platform is obtained as shown in formula (21):
[0097]
[0098]
[0099] in
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com