Method and device for smoothening disparity map and electronic equipment
A disparity map and smoothing technology, applied in the field of image processing, can solve problems such as blurring the edges of the disparity map
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
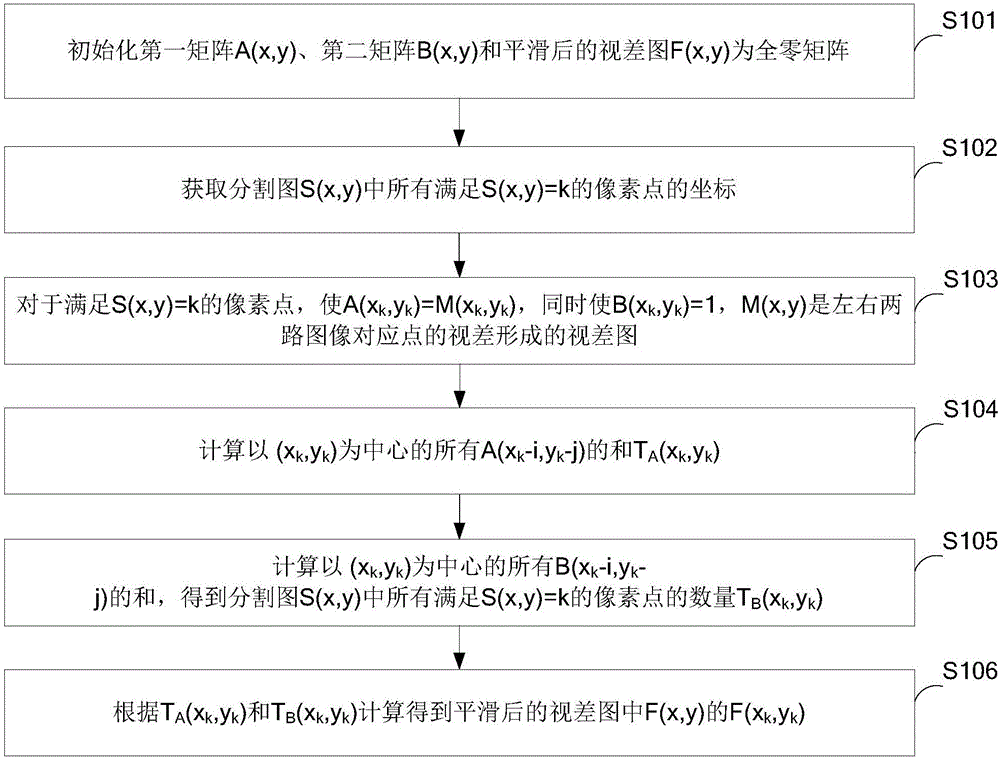
[0053] figure 1 The implementation flow of the method for smoothing the disparity map provided by Embodiment 1 of the present invention is shown, and the details are as follows:
[0054] In step S101, the first matrix A(x, y), the second matrix B(x, y) and the smoothed disparity map F(x, y) are initialized as all-zero matrices.
[0055] In the embodiment of the present invention, I L (x,y) and I R (x, y) are left and right images input to the disparity map smoothing device, and the two images have been horizontally corrected, that is, there is no horizontal difference between the two images. (x, y) is the vertical and horizontal coordinates of the image, (x, y) is a pair of integers not less than 0, and 1≤x≤X, 1≤y≤Y, X and Y are both positive integers, coordinates In the system, the point on the upper left corner is the origin.
[0056] The first matrix A(x, y) and the second matrix B(x, y) are matrices with the same size as the left and right images input to the smoothing...
Embodiment 2
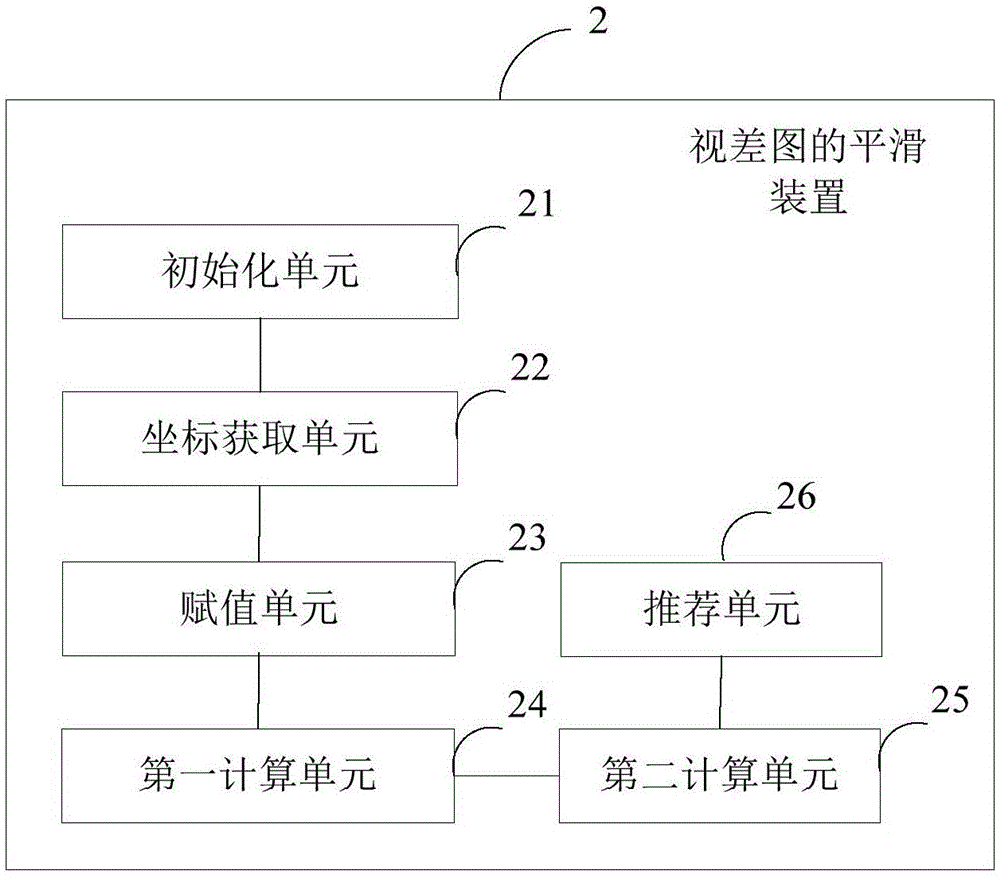
[0080] figure 2 A specific structural block diagram of the apparatus for smoothing a disparity map provided by Embodiment 2 of the present invention is shown. For convenience of description, only parts related to the embodiment of the present invention are shown. The apparatus for smoothing the disparity map may be a software unit, a hardware unit or a combination of software and hardware built in the electronic device, and the electronic device may be a digital TV, a smart phone or a tablet computer. The disparity map smoothing device 2 includes: an initialization unit 21 , a coordinate acquisition unit 22 , an assignment unit 23 , a first calculation unit 24 , a second calculation unit 25 and a third calculation unit 26 .
[0081] Wherein, the initialization unit 21 is used to initialize the first matrix A (x, y), the second matrix B (x, y) and the smoothed disparity map F (x, y) as an all-zero matrix;
[0082] The coordinate acquisition unit 22 is used to acquire the coor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com