Parachute fixed-wing unmanned aerial vehicle autonomous fixed-point recovery method
A technology for autonomous and recovery methods of fixed-wing UAVs, which is applied in three-dimensional position/channel control and other directions, and can solve problems such as the inability to truly achieve autonomous recovery and the inability to manually upload recovery routes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, and the present invention includes but not limited to the following embodiments.
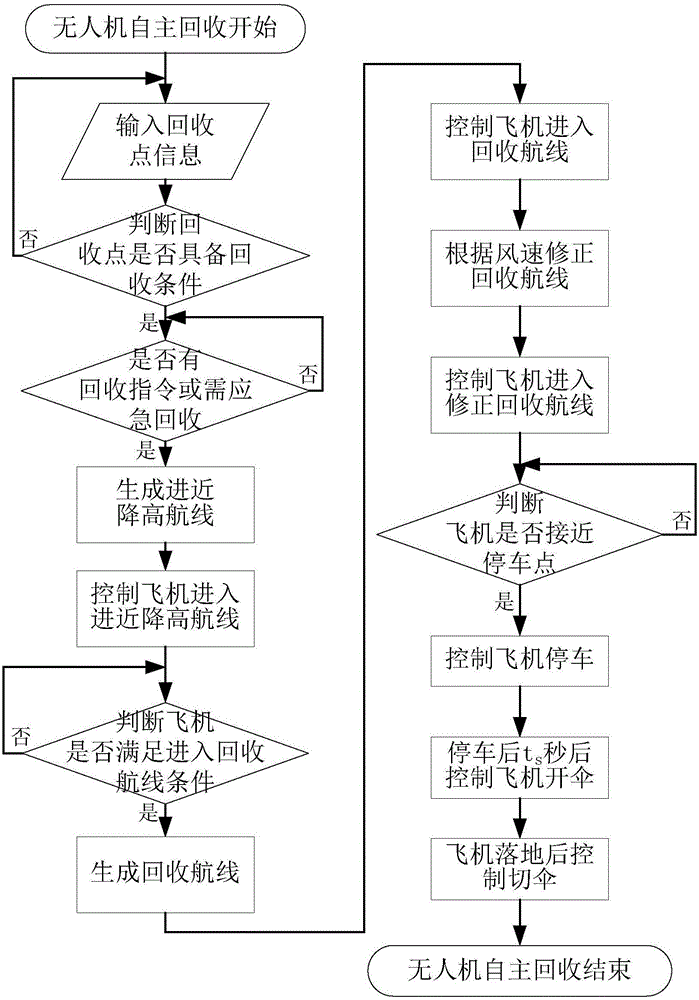
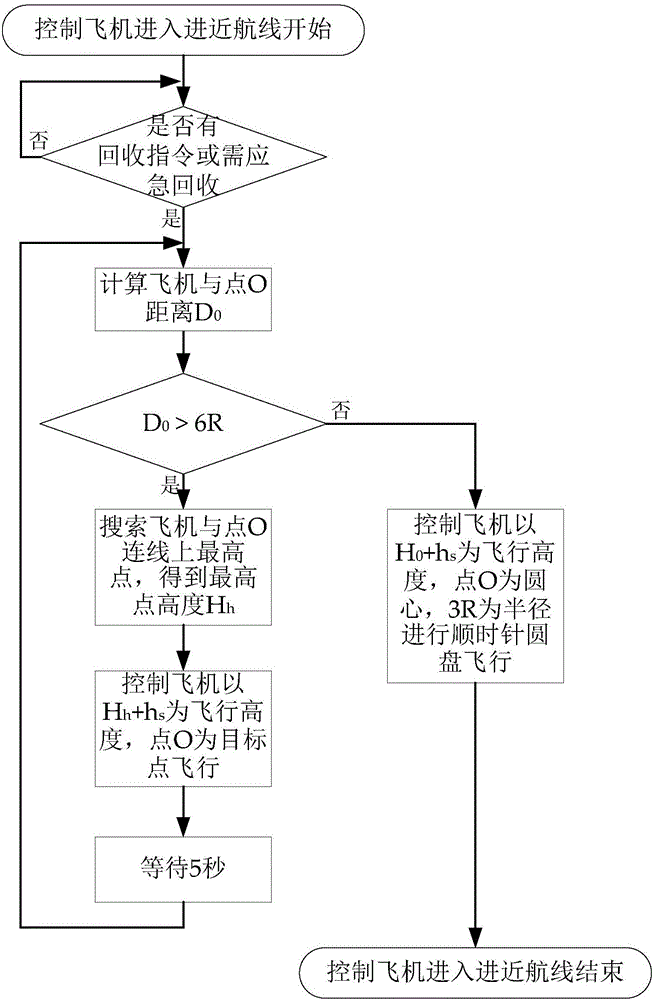
[0046] The steps of the method involved in the present invention are as follows:
[0047] 1. Manually set the recovery point P(x 0 ,y 0 ) (in the north-east coordinate system) and recovery heading α.
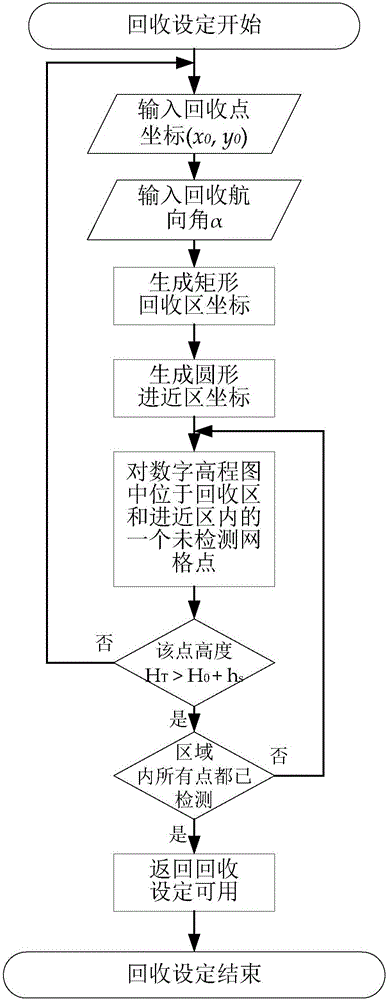
[0048] 2. Determine whether the recycling setting meets the recycling conditions. The specific judgment steps are as follows:
[0049] 1) Generate a recycling area based on a given recycling point and recycling direction. The recycling area is a rectangle with length L and width W. where L=0.5(V smin +V smax ) T 0 , W=2(t s + h s / v d )V 0 , where V smin , V smax is the upper and lower bounds of safe parachute opening speed, the unit is m / s, t s is the time interval between aircraft parking and parachute opening, h s Safe height for the aircraft to open the para...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com