Wrist rehabilitation therapy robot based on spatial parallel drive
A rehabilitation therapy and robot technology, applied in the field of rehabilitation medical robot systems, can solve the problems of less freedom of movement, complex structure, and low precision of movement reproduction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
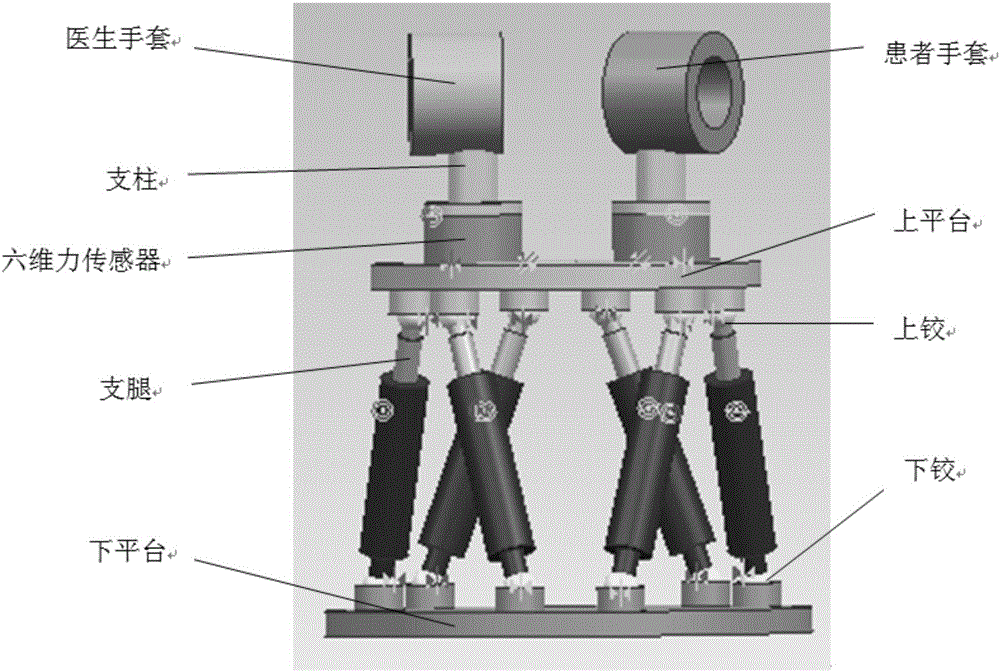
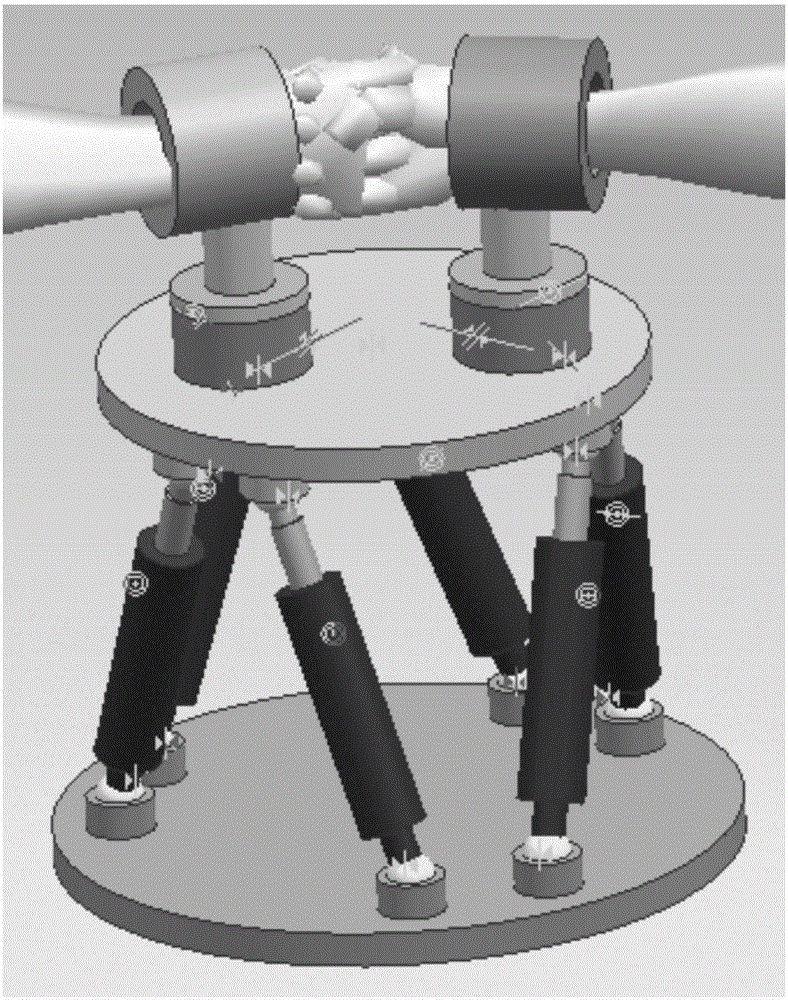
[0006] As shown in the accompanying drawings, the solution adopted by the present invention is: a six-degree-of-freedom parallel mechanism composed of an upper and lower platform, six driving legs, and a hinge connecting the upper and lower platforms and six driving legs, used for six degrees of freedom of detection signals The Weili sensor, the glove used to fix the wrist, and the computer hardware and software system for signal processing, storage, and precise control of the motion platform, together constitute a wrist rehabilitation treatment system that can achieve expected functions. Among them, the lower platform is fixed to the ground or to a plane fixed to the ground to support the entire motion system and serve as a reference for the movement of the upper platform. The upper platform is used to drive the wrist to achieve the established movement law. The upper surface of the upper platform is equipped with a six-dimensional force sensor. The upper surface of the sensor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com