Robot cartesian space trajectory planning method
A Cartesian space and robotics technology, applied in the direction of instruments, adaptive control, attitude control, etc., can solve problems that affect the successful execution of tasks, cannot be solved, and the singularity of the planning path
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0115] Example 1: Series five-joint Katana and youBot robotic arms
[0116] Manipulator features: the main control joint c of the two is joint 1, and the self-optimizing joint so is joint 5. If there is no adjustment joint ft, then th=4, mh=3, bh=2, c=1, see Figure 8 with Picture 9 .
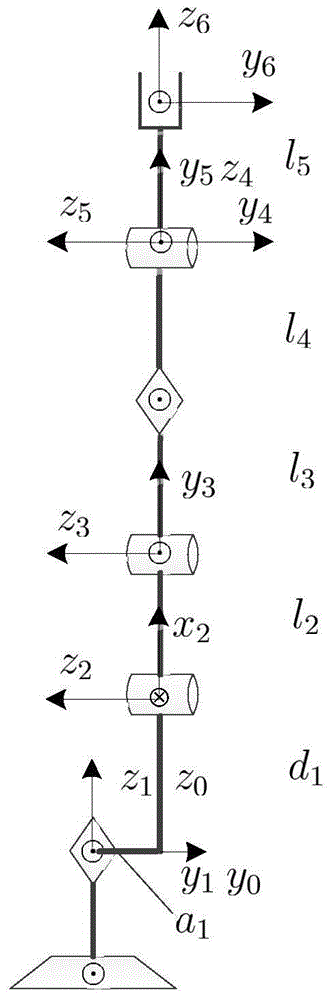
[0117] Step 1: Establish the linkage coordinate system: establish the Z-axis and X-axis of the robot linkage according to the DH method. The base coordinate system is fixed to the base, and each joint coordinate system is established in turn, and the rotation angle of each joint axis is named Respectively θ 1 , Θ 2 , Θ 3 , Θ 4 , Θ 5 ; Suppose the vertical state is the initial position.
[0118] Step 2: Take KUKAyouBot as an example, when a 1 =0 is the Katana arm, the solution process of positive kinematics
[0119] Table 1. D-H connecting rod parameter table of robotic arm
[0120]
[0121]
[0122] T 0 B = 1 0 0 a 0 0 1 0 0 0 0 1 ...
Embodiment 2
[0220] Example 2: Series five-joint Pioneer-arm arm and series six-joint PUMA560 arm
[0221] Manipulator features: the main control joint c of the two is joint 1, the adjustment joint ft is 4, the latter has a self-optimizing joint so is joint 6, and the former does not exist, then th=4, mh=3, bh=2, c= 1. See Picture 10 with Picture 11 . Among them, the series six-joint type PUMA560 can be regarded as the series five-joint type Pioneer type, which is the expansion of the under-degree-of-freedom manipulator to achieve five solutions to six.
[0222] Step 1: Establish the linkage coordinate system: Establish the Z-axis and X-axis of the robot linkage according to the DH method. The base coordinate system is fixed to the base, and each joint coordinate system is established in turn, and the rotation angle of each joint axis is named Respectively θ 1 , Θ 2 , Θ 3 , Θ 4 , Θ 5 ; Suppose the vertical state is the initial position.
[0223] Step 2: Take Pioneer-arm as an example, the pos...
Embodiment 3
[0343] Embodiment 3: Series-connected six-joint humanoid robot humanoid legs and extended redundant legs
[0344] As there is a situation where it can move or rotate in or around the base coordinate system x, y, z directions, the projection position is affected by the movement along the axial direction. At this time, it is necessary to combine the end attitude to achieve an accurate solution θ c the goal of. The five-axis linkage CNC machine tool can be regarded as a tandem manipulator, with three joints moving along the base coordinate system x, y, and z directions.
[0345] Features: For the humanoid leg of a humanoid robot, the main control joint c is joint 1, and the self-optimizing joint so is the redundant leg end joint. There is no adjustment joint ft. The joint positions of joints 2 and 3 and joints 5 and 6 are coincident respectively. Then th=6, mh=4, bh=2, c=1, see Picture 12 with Figure 13 .
[0346] Step 1: Establish the linkage coordinate system: Establish the Z-axis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com