Quadrotor posture control method based on MIMO nonlinear uncertain backstepping approach
A control method and quadrotor technology, applied in attitude control, three-dimensional position/channel control, etc., can solve the problems of quadrotor aircraft model uncertainty and external interference, difficult to deal with strong coupling and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
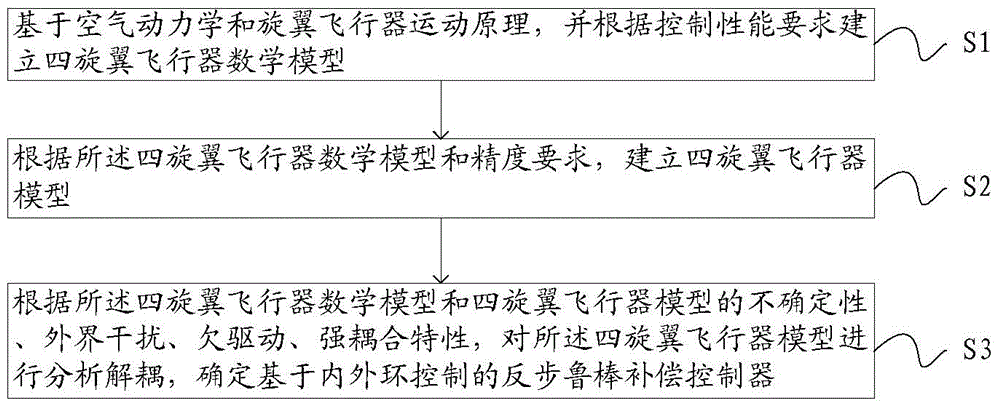
[0070] see figure 1 As shown, the embodiment of the present invention provides a quadrotor pose control method based on MIMO nonlinear uncertain backstepping method, including:
[0071] S1: Based on the principle of aerodynamics and rotorcraft motion, and according to the control performance requirements to establish a mathematical model of the quadrotor aircraft;
[0072] S2: Establish a quadrotor aircraft model according to the quadrotor aircraft mathematical model and accuracy requirements;
[0073] S3: According to the mathematical model of the quadrotor aircraft and the uncertainty, external disturbance, underactuation, and strong coupling characteristics of the quadrotor aircraft model, analyze and decouple the quadrotor aircraft model, and determine the backstepping based on inner and outer loop control Robust compensation controller.
[0074] The four-rotor pose control method based on the multiple-input multiple-output (Multiple-Input Multiple-Output, MIMO) nonlinea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com