A bionic leg structure for legged robots
A robot and leg technology, applied in the field of bionic leg structure, can solve the problems of increasing load capacity, high energy consumption, poor environmental adaptability, etc., and achieve the effect of increasing load capacity, improving load capacity, and increasing contact area
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Further describe the present invention below in conjunction with embodiment and accompanying drawing thereof. However, the protection scope of the claims of the present application is not limited to the description scope of the embodiments.
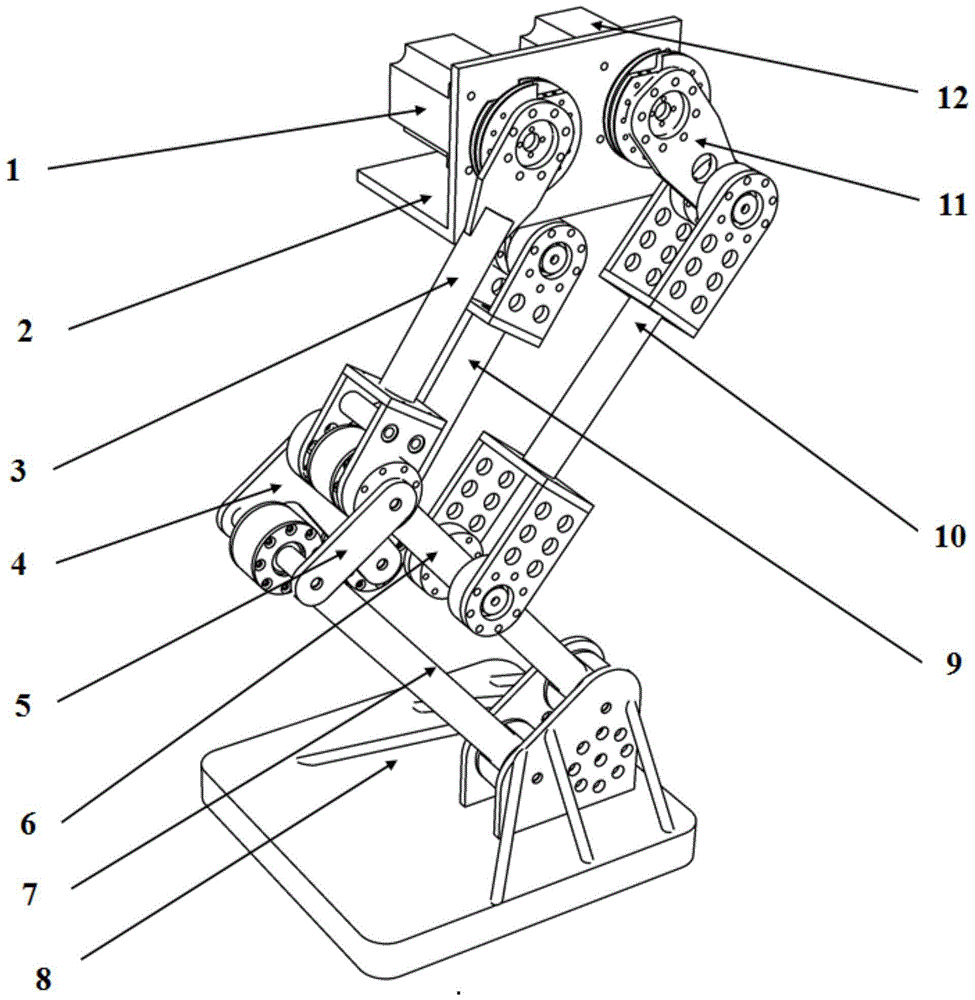
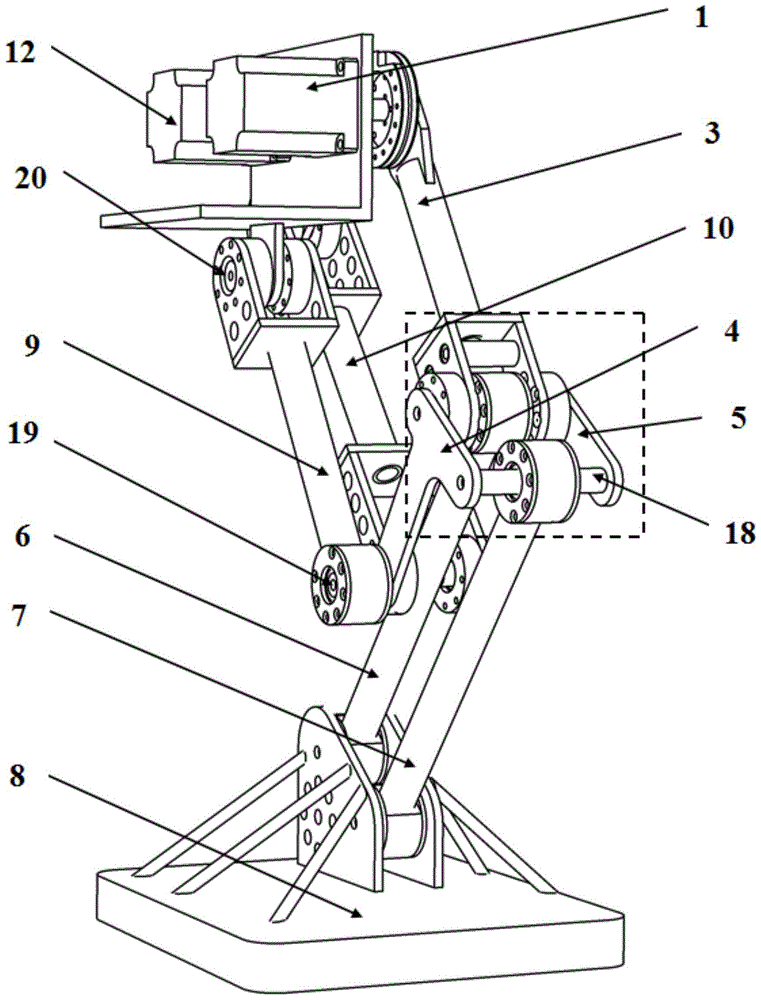
[0023] The bionic leg structure (leg structure or bionic leg for short) that can be used for legged robot designed by the present invention, see Figure 1-6 ), characterized in that the leg structure includes a lifting system, a pushing system, an auxiliary supporting system, a cooperating system and a frame 2.
[0024] The lifting system mainly includes a lifting motor 1 and a lifting rod 3 . The lifting motor 1 is fixedly connected to the frame 2 by screws; the lifting rod 3 is fixedly connected to the lifting motor 1 through a reducer, a flange, and the two rotate synchronously (see figure 1 , 2 ).
[0025] The push system mainly includes a push motor 12 , a No. 1 push rod 11 , and a No. 2 push rod 10 . The push motor 12 is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com