A method and an apparatus for automatically generating a collision free return program for returning a robot from a stop position to a predefined restart position
A technology of stop position and robot, applied in the direction of program control, program control manipulator, instrument, etc., can solve the problems of manual correction and return program, unsuitable for determining the return path of the robot, time-consuming and other problems, and achieve simple and robust error handling , the effect of simplifying error handling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
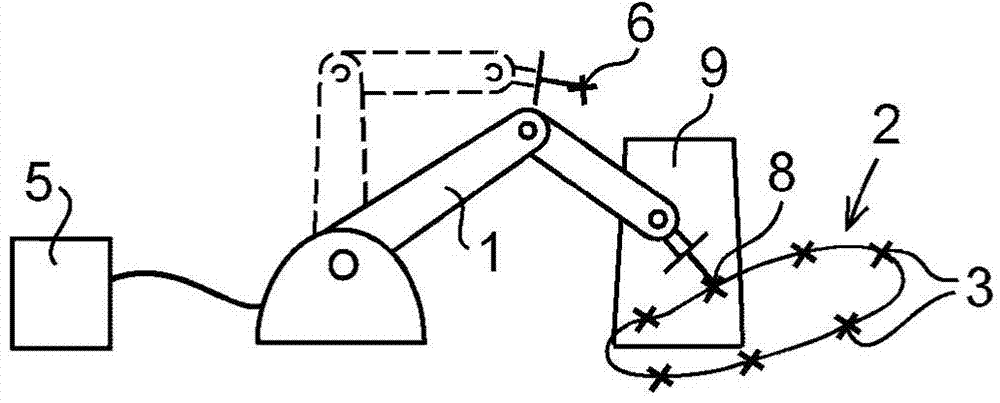
[0037] figure 1 A teach-in program-based industrial robot 1 is shown following a programmed path 2 comprising a plurality of programmed positions 3 . The teaching program runs on the robot controller 5 which controls the movement of the robot. figure 1 Also shown is the robot in restart position 6 (dotted line). Predefine the restart position of the robot, which is the position to which the robot must return when recovering after an emergency stop due to an error. If the robot cell includes more than one robot, define restart positions for each robot in the cell. The restart position is where the robot is moved to when the robot in the cell stops due to an error. The robot has stopped at stop position 8. The robot is located in a robot cell containing the workstation 9 . The robot should be moved from stop position 8 to restart position 6 without colliding with workstation 9 . If the robot cell includes more than one robot, all robots stop during the emergency stop.
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com