An electric lifting chassis for a field operation robot
A field operation and robot technology, applied in the direction of circuit or fluid pipeline, elastic suspension, suspension, etc., can solve the problems of different planting standards and large changes in the row spacing of crops.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The structural principle and working principle of the present invention will be described in detail below with reference to the accompanying drawings:
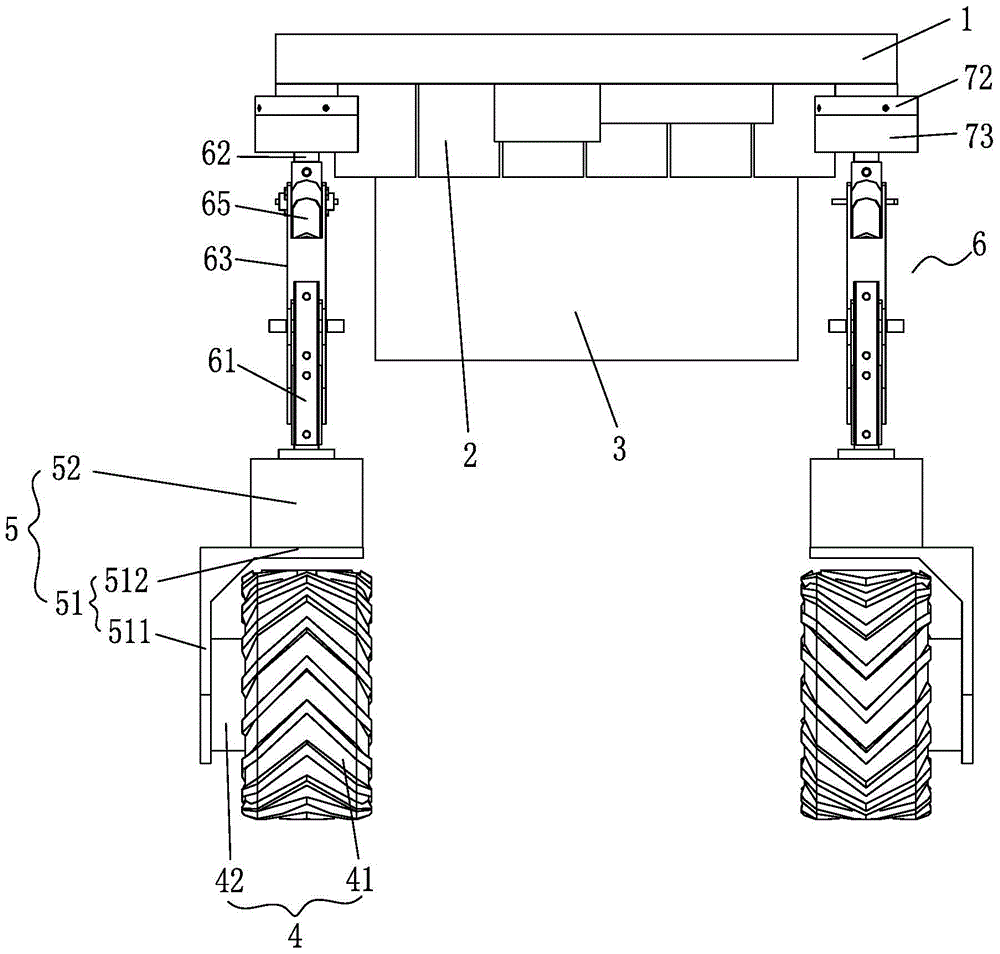
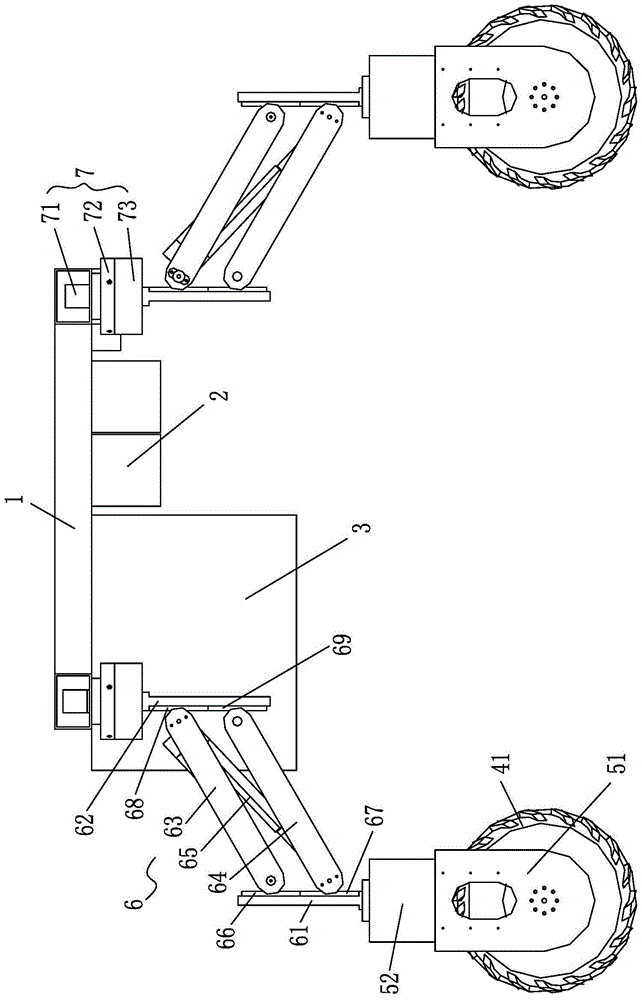
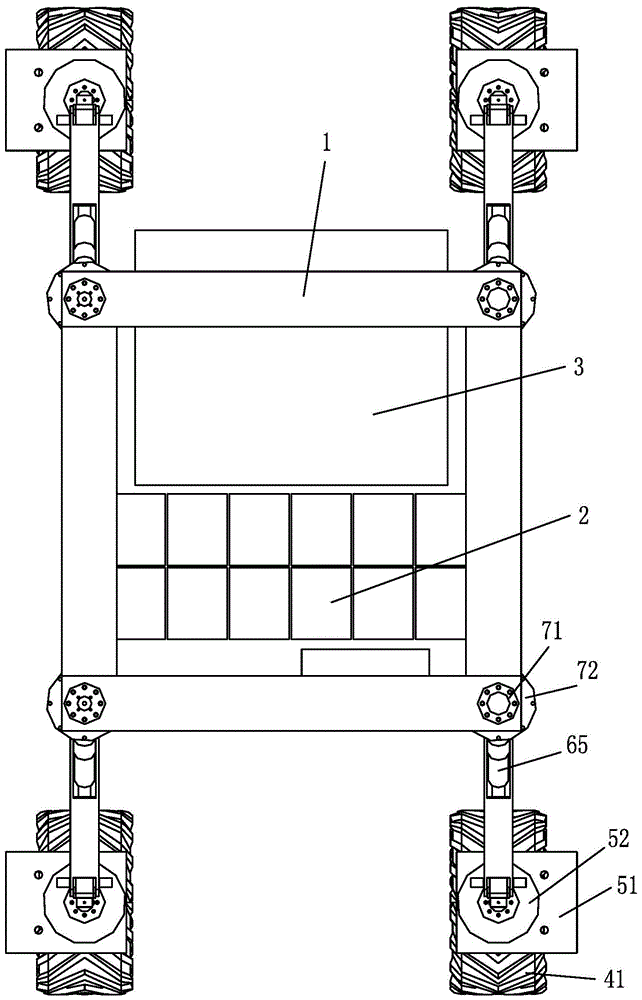
[0044] See figure 1 , figure 2 and image 3 , figure 1 Is a front view of an electric lifting chassis according to an embodiment of the present invention, figure 2 for figure 1 Left view of, image 3 for figure 1 Top view. The electric lifting chassis for field operation robots of the present invention includes a main frame 1 and a power supply 2, a controller 3, a walking mechanism 4, a steering mechanism 5, and a lifting mechanism 6 installed on the main frame 1, wherein the power supply 2 is preferably a 48V battery pack, the controller 3 is respectively connected to the power supply 2, the running mechanism 4, the steering mechanism 5 and the lifting mechanism 6, and the running mechanism 4, the steering mechanism 5 and the lifting mechanism 6 are respectively connected to the power source 2 is connected, wherein t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com