Autonomous underwater robot signal processing method based on particle swarm optimization monostable adaptive stochastic resonance
An underwater robot and particle swarm optimization technology, applied in the direction of adaptive control, instruments, control/adjustment systems, etc., can solve problems such as difficulty in achieving optimal stochastic resonance effects, lack of reasonable theoretical basis, and neglect of parameter interaction, etc., to achieve Accurate AUV status information, improve accuracy, and suppress external interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be described in more detail below with examples in conjunction with the accompanying drawings.
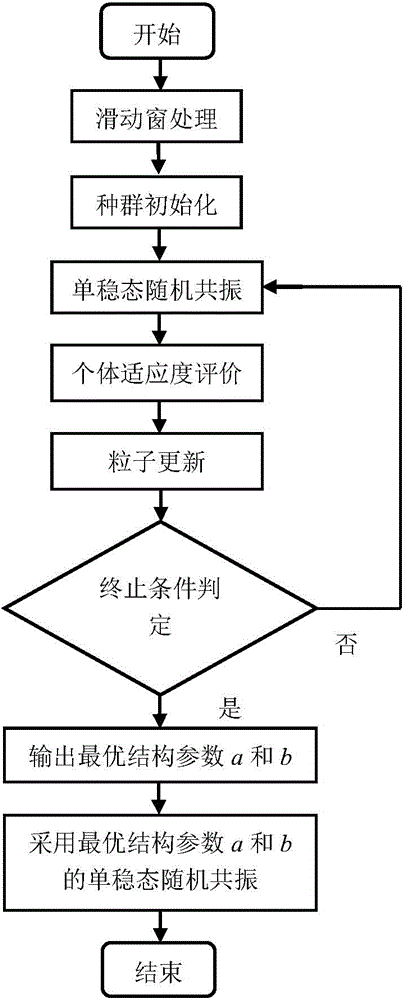
[0023] to combine figure 1 , the autonomous underwater robot signal processing method based on particle swarm optimization monostable adaptive stochastic resonance of the present invention, its specific implementation steps are as follows:
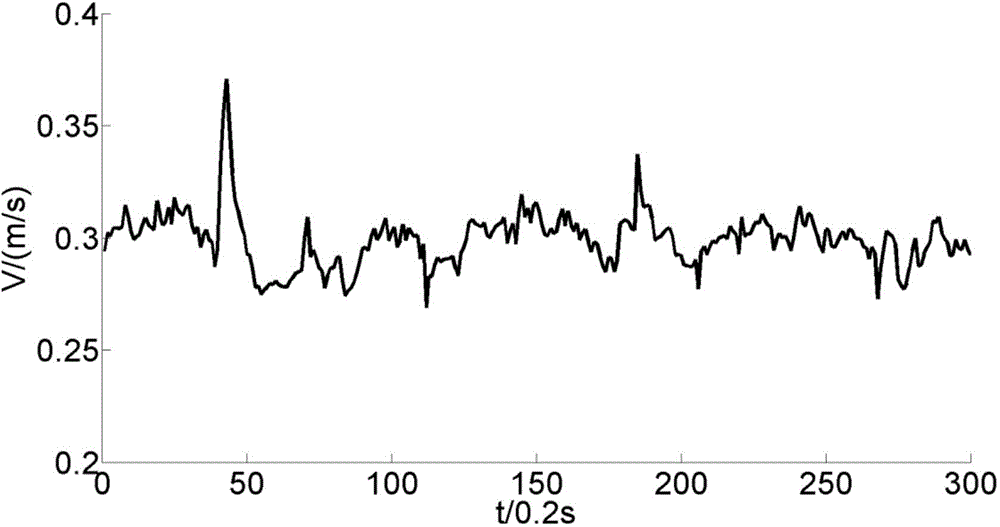
[0024] 1. First, the original data is intercepted with a sliding window, the original data such as figure 2 shown. When the Doppler data with a data length of L=300 is collected, the detection algorithm is started. When new data is collected again, the first data of the original array is discarded and the newly collected data is placed at the end of the original array. The data length is L.
[0025] 2. Use the particle swarm optimization algorithm to optimize the structural parameters of the monostable stochastic resonance system. First, initialize the population. The specific method is: set the search rang...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com