


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Whole machine magnetometer calibration method applied to micro unmanned plane
A calibration method and magnetometer technology, applied in the field of detection, can solve problems such as incomplete calibration parameters and complex magnetometer calibration, and achieve the effects of high execution efficiency, complete error parameters, and high feasibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0020] The present invention will be further introduced below in conjunction with the accompanying drawings.
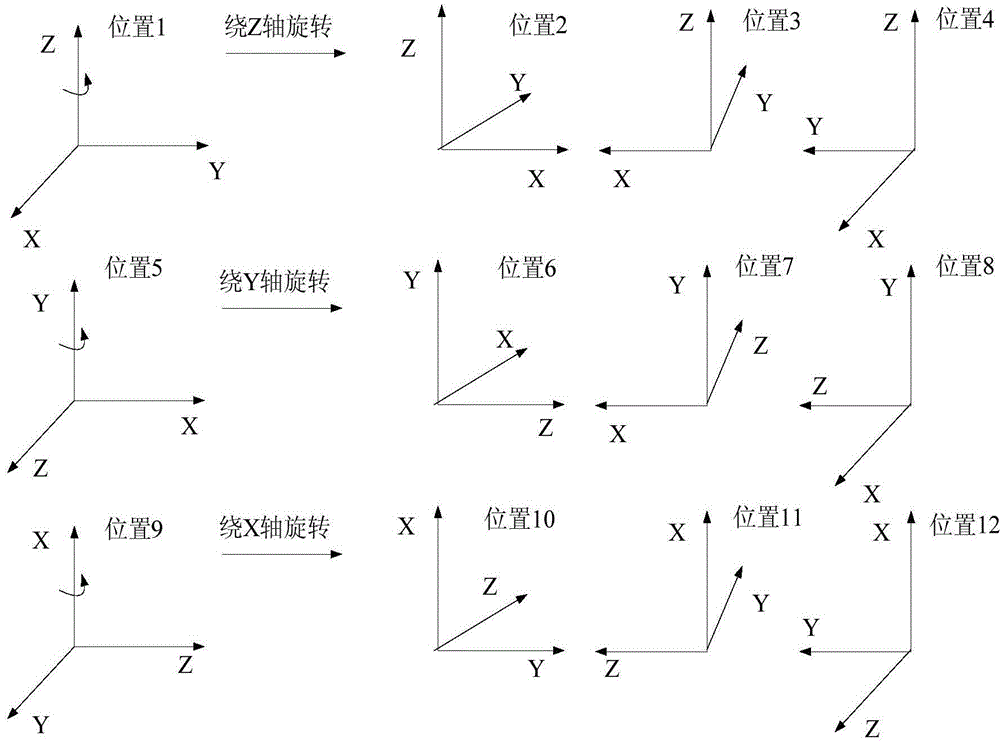
[0021] Before calibration, the drone needs to be powered on so that the calibration environment of the magnetometer is similar to the working environment during flight.
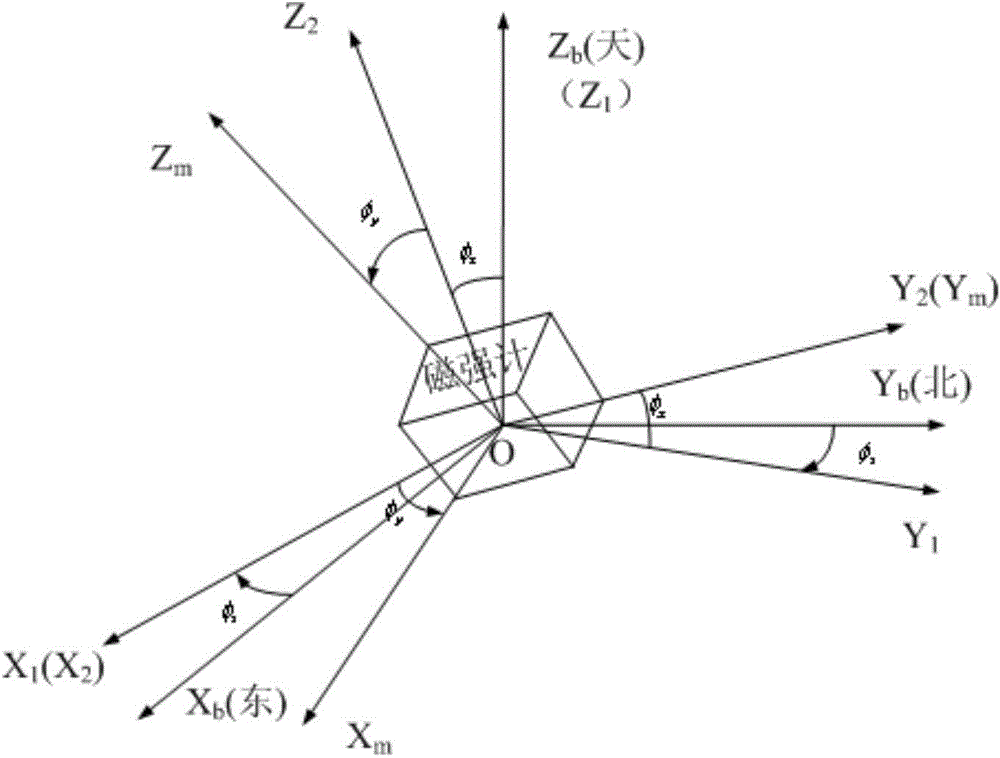
[0022] During the calibration process, the micro UAV is figure 2 Rotate as shown to ensure calibration accuracy. The UAV collects magnetometer data at the corresponding attitude by detecting the state of the sensor, and calculates the error parameters of the corresponding process. The relevant control commands are sent through the UAV ground station, see figure 1 , to realize the online calibration of the magnetometer of the micro UAV. The calibration content includes: external magnetic interference and magnetometer sensor error parameter calculation, installation error parameter calculation, and machine error parameter integration.
[0023] The specific implementation method is as follows:
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com