A direct drive robot control system for polar wing sails
A control system and robot technology, applied in the field of robots, can solve the problems of heading attitude control and anti-overturning, and achieve the effect of avoiding the danger of overturning, easy to implement, and reasonable in structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
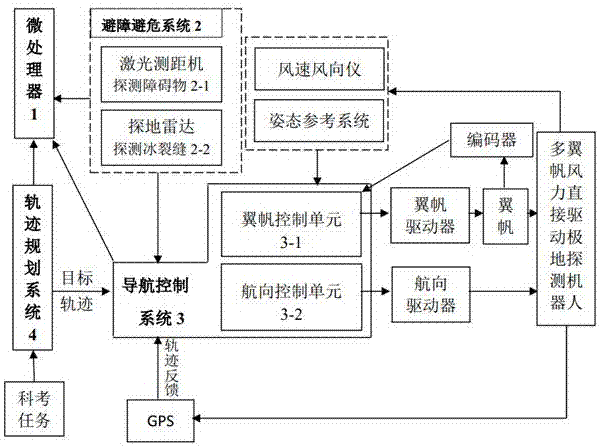
[0022] see figure 1 , the polar sail wind direct drive robot control system, including trajectory planning system (4), obstacle avoidance system (2), navigation control system (3), and microprocessor (1); characterized in that: The trajectory planning system (4) is respectively connected with the navigation control system (3) and the microprocessor (1), and plans the target trajectory path of the entire wingsail robot according to the scientific research task; the obstacle avoidance system (2 ) are respectively connected with the navigation control system (3) and the microprocessor (1), detect real-time road conditions through sensor elements, and feed back to the wing sail robot for obstacle avoidance; the navigation control system (3) is respectively connected with the trajectory planning system (4), the obstacle avoidance system (2) is connected with the microprocessor (1), receives the GPS signal and outputs the control signal to the wing sail driver and the heading driver...
Embodiment 2
[0024] This embodiment is basically the same as Embodiment 1, and the special features are as follows: the trajectory planning system (4) designs the target trajectory instruction of the detection robot according to the scientific research task, and transmits the instruction to the navigation control unit. The obstacle avoidance system (2) includes a laser rangefinder (2-1) and a ground-penetrating radar (2-2), and the laser rangefinder (2-1) and the ground-penetrating radar (2-2) 2) Both are connected with the microprocessor (1) for real-time information interaction control feedback. The navigation control system (3) includes a winged sail control unit (3-1) and a heading control unit (3-2), according to the target trajectory provided by the trajectory planning system (4), the trajectory feedback provided by GPS and The obstacle information fed back by the laser range finder (2-1) and the ice crack information fed back by the ground penetrating radar (2-2) give the target hea...
Embodiment 3
[0026] like figure 1 As shown, a polar sail wind direct drive robot control system includes a trajectory planning system (4), an obstacle avoidance system (2), a navigation control system (3), and a microprocessor (1); The trajectory planning system (4) is connected with the navigation control system (3) and the microprocessor (1) respectively, and plans the target trajectory path of the entire wingsail robot according to the scientific research task; the obstacle avoidance system (2) Connect with the navigation control system (3) and the microprocessor (1) respectively, detect real-time road conditions through sensor elements, and feed back to the wing sail robot for obstacle avoidance; the navigation control system (3) is respectively connected with the trajectory planning system (4) , the obstacle avoidance system (2), the GPS and the microprocessor (1) are connected, and the wing sail unit and the heading control unit of the wing sail robot are controlled through the motor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com