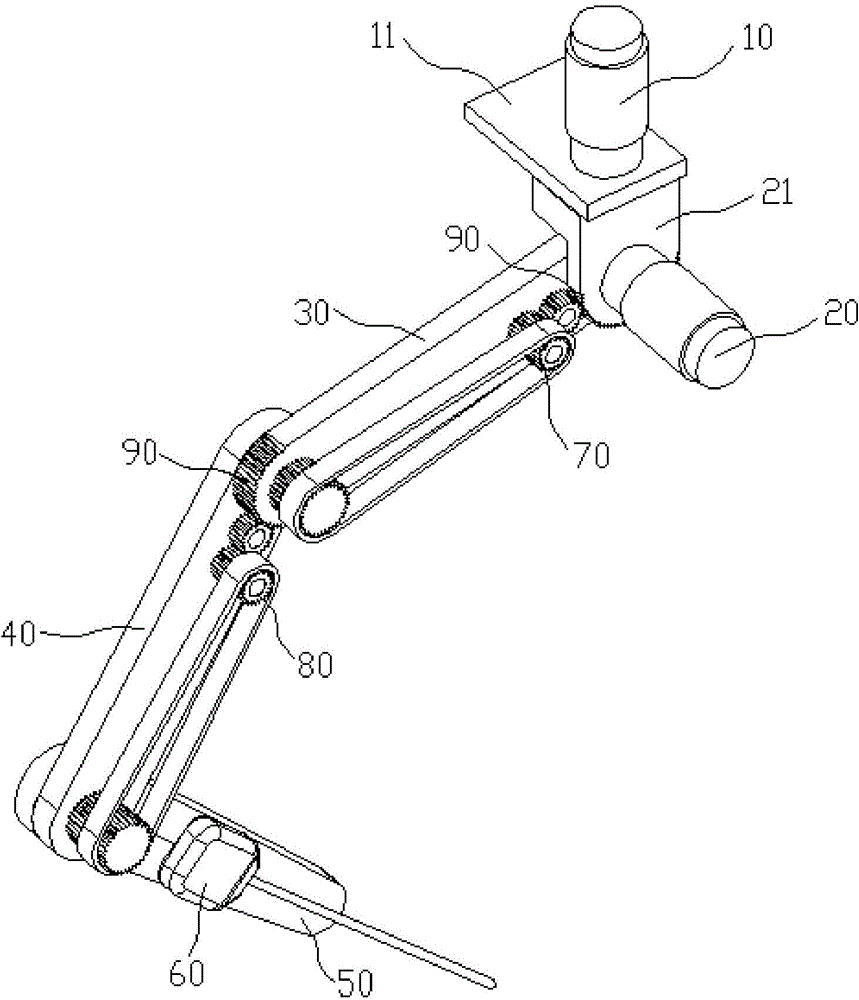
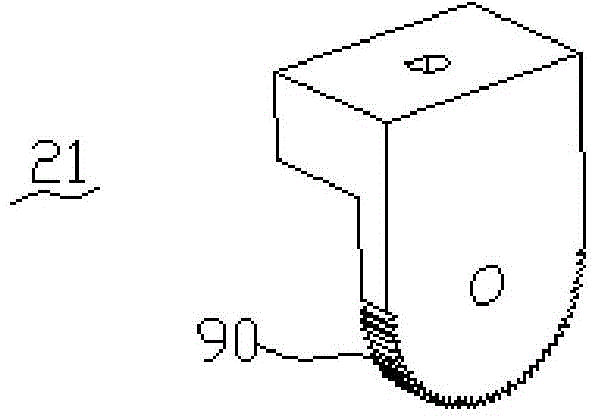
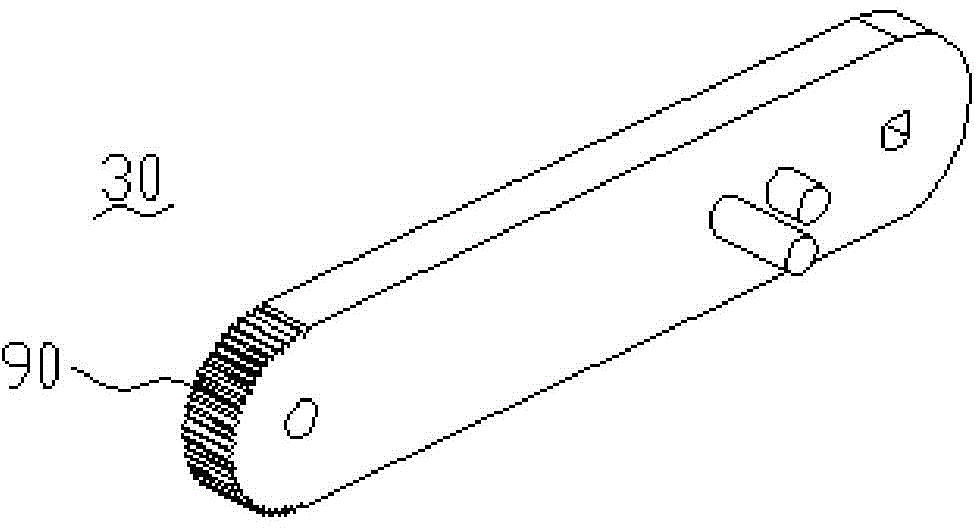
Approximate telecentric fixed-point mechanism for minimally invasive surgery operation
A minimally invasive surgery and telecentric technology, applied in the field of medical devices, can solve the problems of unfavorable minimally invasive surgery, large structural size, difficult control, etc., and achieve the effect of convenient control, large working space and precise transmission ratio
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0032] Embodiment: The embodiment of the present invention is illustrated by specific specific examples below. Those skilled in the art can easily understand other advantages and effects of the present invention from the contents disclosed in this specification. The descriptions "below", "top", "bottom", etc. are defined in the usual sense, e.g., with reference to the definition of the direction of gravity, the direction of gravity is below, the opposite direction is above, similarly above is top Or the top, and what is below is the bottom or the bottom; the description of "first", "second" and "third" mentioned in this embodiment is for the convenience of description, and has nothing to do with the importance of parts, It is not intended to limit the practicable scope of the present invention, and the change or adjustment of the relative relationship shall also be regarded as the practicable scope of the present invention without substantially changing the technical content. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com