Computer-based convex polygon field unmanned aerial vehicle spraying operation route planning method
A convex polygon and track planning technology, which is applied in the field of trajectory planning of convex polygonal UAV spraying operations in farmland
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
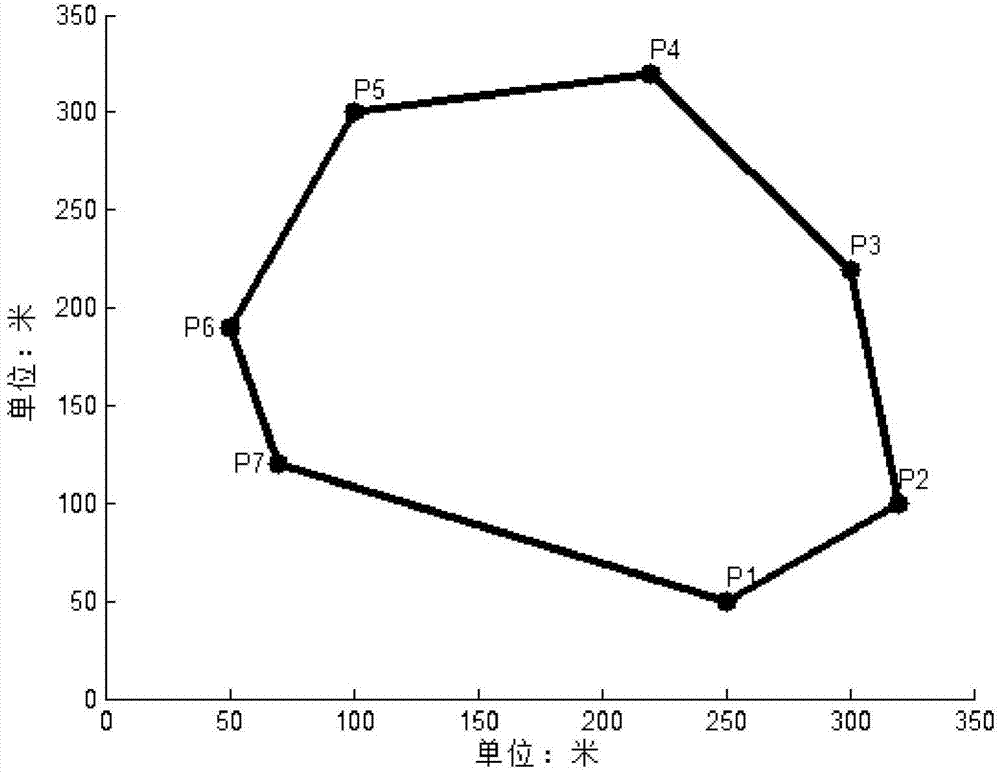
[0070] 1) For a convex polygonal farmland, the operator uses a handheld GPS positioning device to collect key position points along one direction along the boundary of the convex polygonal area (here, it is assumed that the direction of collection points is counterclockwise, and in actual operation, clockwise and counterclockwise method and result of the present invention are all unaffected), assuming that n points have been collected altogether, and the coordinates of each point in order are P 1 (x 1 ,y 1 ), P 2 (x 2 ,y 2 ), P 3 (x 3 ,y 3 ),...,P n (x n ,y n ); After the points are collected, the adjacent points are connected in sequence to form the farmland boundary. Then use the general formula ax+by+c=0 of the straight line equation to find out the adjacent two-point straight line P of the key position point 1 P 2 , P 2 P ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com