Non-contact control method and equipment based on gestures
A non-contact, control method technology, applied in the direction of program control, electrical program control, general control system, etc., can solve problems such as being vulnerable to electric shock, user electric shock, water vapor leakage, etc., to improve user experience, avoid electric shock hazards, and operate simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
[0037] This embodiment provides a gesture-based non-contact control method, including the following steps:
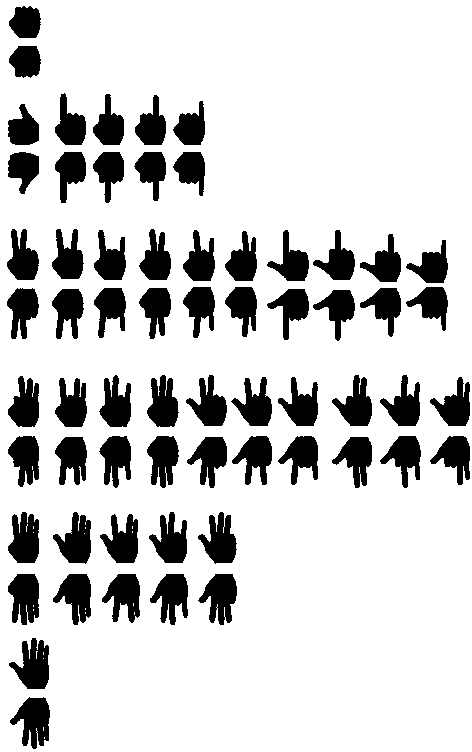
[0038] S1: Pre-store a plurality of pre-stored gesture shapes that have been associated with different control signals.
[0039] Such as figure 1As shown, the pre-stored gesture shape can be any one or combination of the following: (1) make a fist up or down (that is, no finger extended), (2) extend a finger up or down, (3) up or down Extend two fingers downward, (4) extend three fingers upward or downward, (5) extend four fingers upward or downward, (6) extend palm fully open (i.e. extend five fingers); these different pre-stored gesture shapes can be associated with a control signal individually or in combination. For example: Stretch out a finger upward, which can be associated with control signals such as volume up, temperature rise, heating, forward; extend a finger downward, can be associated with control signals such as volume down, cool down, cool down, and b...
Embodiment approach 2
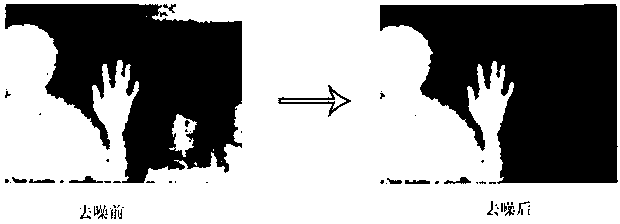
[0055] This embodiment is roughly the same as Embodiment 1, except that step S3-3 is different. In this embodiment, S3-3 is: remove the point cloud mid-distance preset corresponding to the point cloud data within the preset recognition range The point cloud beyond the preset distance from the origin to get a new smaller point cloud, which is the point cloud of the gesture to be tested.
[0056] Other steps in this embodiment are the same as those in Embodiment 1, and will not be repeated here.
Embodiment approach 3
[0058] This embodiment is roughly the same as Embodiment 2, except that step S3-5 is different. In this embodiment, S3-5 is: detecting the contour of the two-dimensional shape projected by the point cloud on the projection plane to obtain a sense Measure gesture shape.
[0059] The specific steps for detecting the contour of the above-mentioned two-dimensional shape are as follows:
[0060] a) First find the convex hull of the contour ( Figure 6 circumscribed polygon in ).
[0061] The point cloud on the two-dimensional plane is detected, and the convex hull is a convex polygon formed by connecting the outermost points of the point cloud, which can contain all the points in the point cloud.
[0062] b) Find the palm position.
[0063] Find every two adjacent convex hull endpoints ( Figure 6 The point on the contour between the solid triangle points in ) is the farthest point from the two points, and this point is the deepest concave point on the contour, which is called ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com