Landing control method for small astrophysical probes based on online estimation of model-free interference
A technology for landing control and small celestial bodies, which is applied in the direction of aerospace vehicle landing devices, aerospace vehicle guidance devices, and systems for aerospace vehicles returning to the earth's atmosphere. And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0036] Specific implementation mode 1. Combination Figure 1 to Figure 4 In this embodiment, the method for controlling the landing of small astrophysical probes with online estimation without model interference is described. The specific steps are as follows:
[0037] 1. During the landing process of the small astrophysical probe, the kinetic equation of the probe is established as:
[0038] x · · - 2 ω y · - ω 2 x = F x + f ...
specific Embodiment approach 2
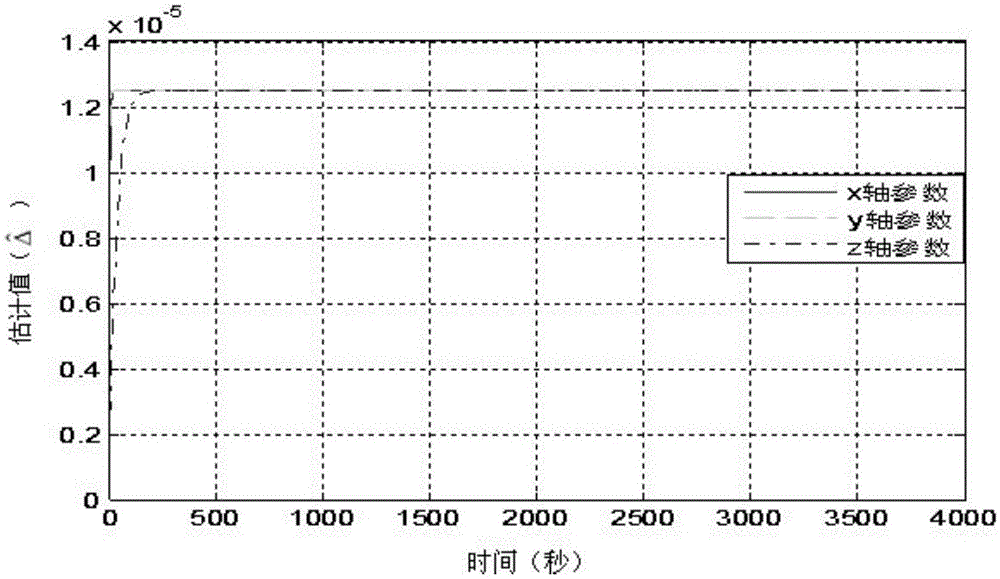
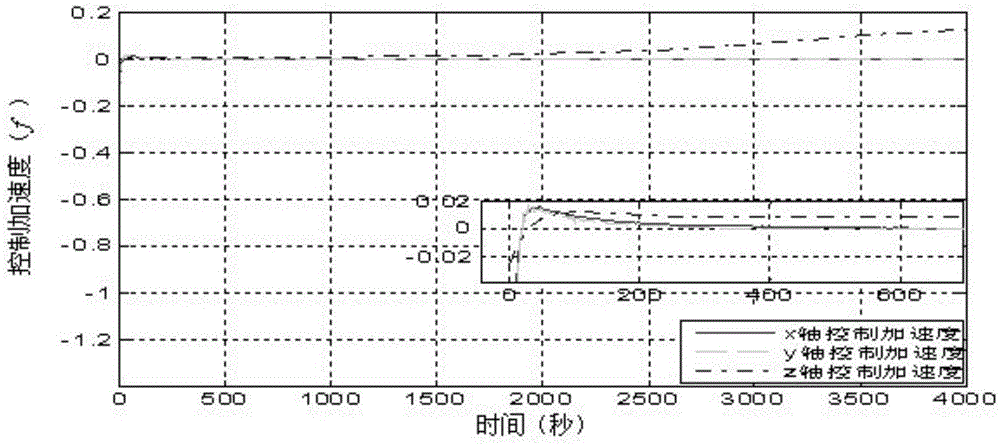
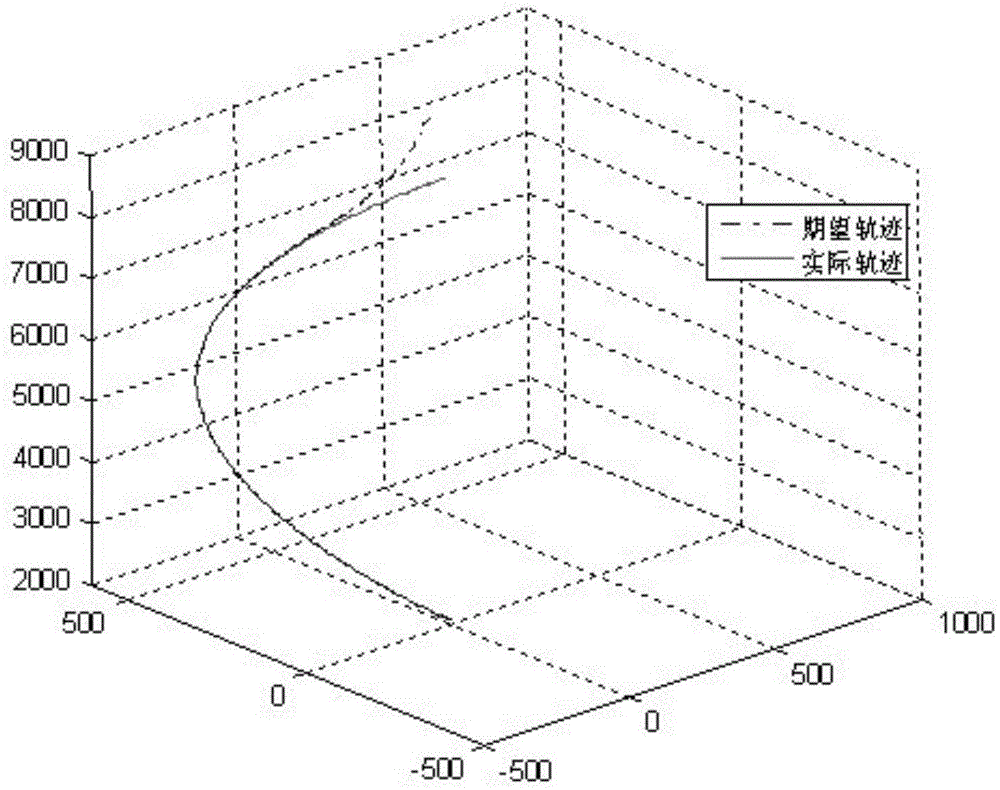
[0081] Specific embodiment two, combine Figure 1 to Figure 4 Describe this embodiment. This embodiment is an embodiment of the method for controlling the landing of a small astronomical body detector without model online estimation described in the first embodiment. The method described in the first embodiment is used for simulation testing to test the landing of small astronomical bodies. The parameters are shown in Table 1, and Table 1 is the parameters related to the landing small celestial body in the simulation test.
[0082] Table 1
[0083] GM (m 3 / s 2 )
ω
a(m)
C 20
C 22
4.842×10 5
1.65×10 -4
1138.5
-0.043
0.058
[0084] The simulation test landing trajectory parameters are shown in Table 2, and Table 2 is the simulation test landing trajectory parameters.
[0085] Table 2
[0086]
[0087] The landing control parameters of the simulation test are shown in Table 3.
[0088] table 3
[0089] Under the ab...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com