Jellyfish swimming type serial bionic underwater propulsion device
A propulsion device, swimming technology, applied in the direction of water action propulsion elements, ship propulsion, propulsion components, etc., can solve the problems of complex mechanical structure, large difference in propulsion behavior, and low system integration.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
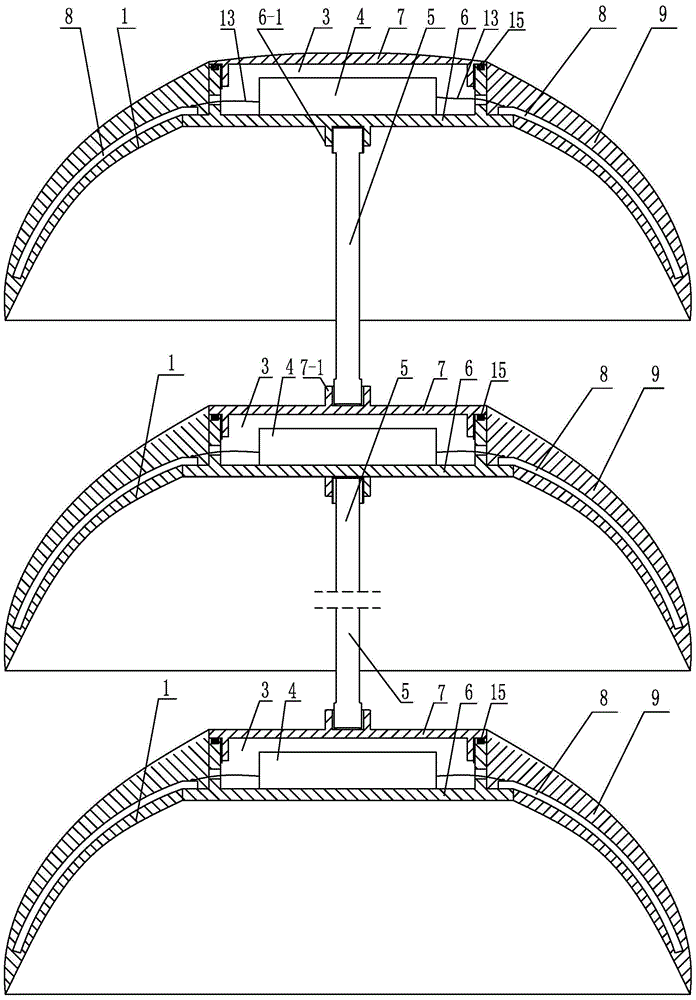
[0014] Specific implementation mode one: combine Figure 1-Figure 5 Explain that the jellyfish swimming series bionic underwater propulsion device of this embodiment includes N power supply and control modules 4, and it also includes N-1 inter-stage connecting shafts 5 and N-stage propulsion machine jellyfish 1, wherein N is a positive integer , and N≥2;
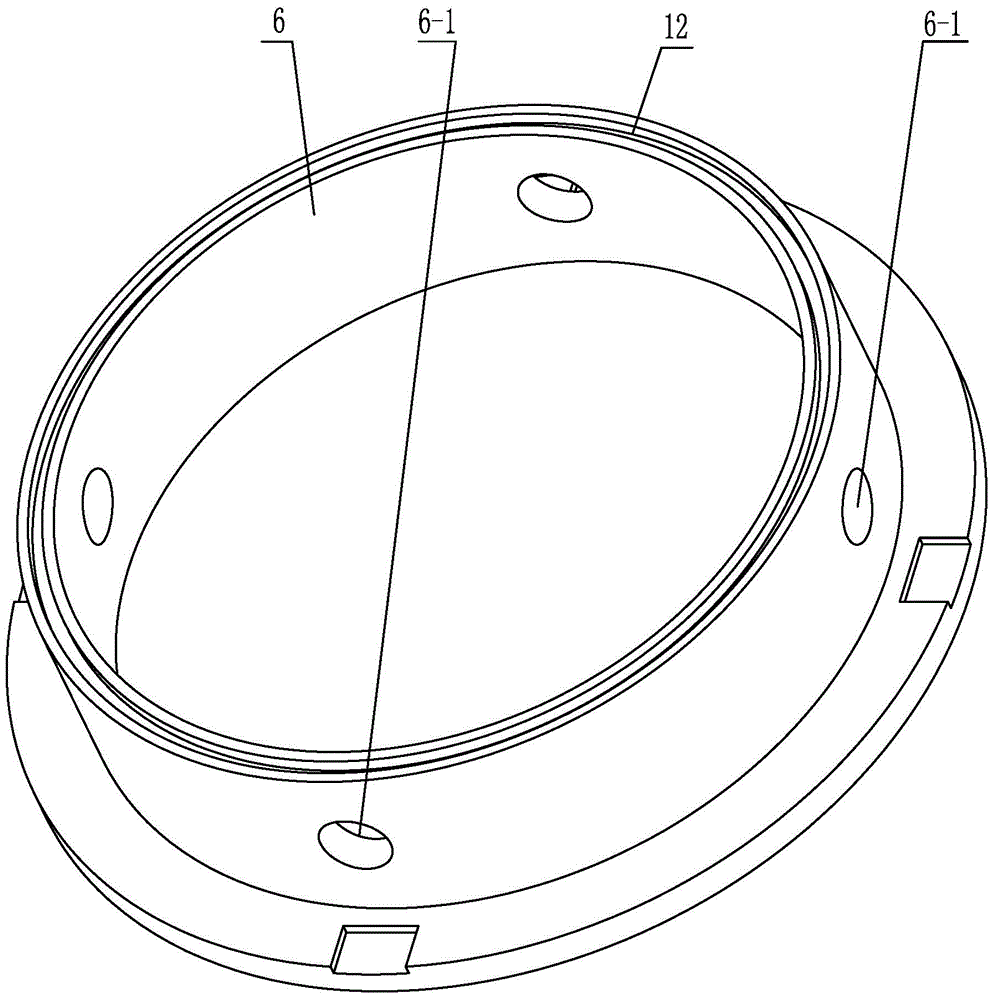
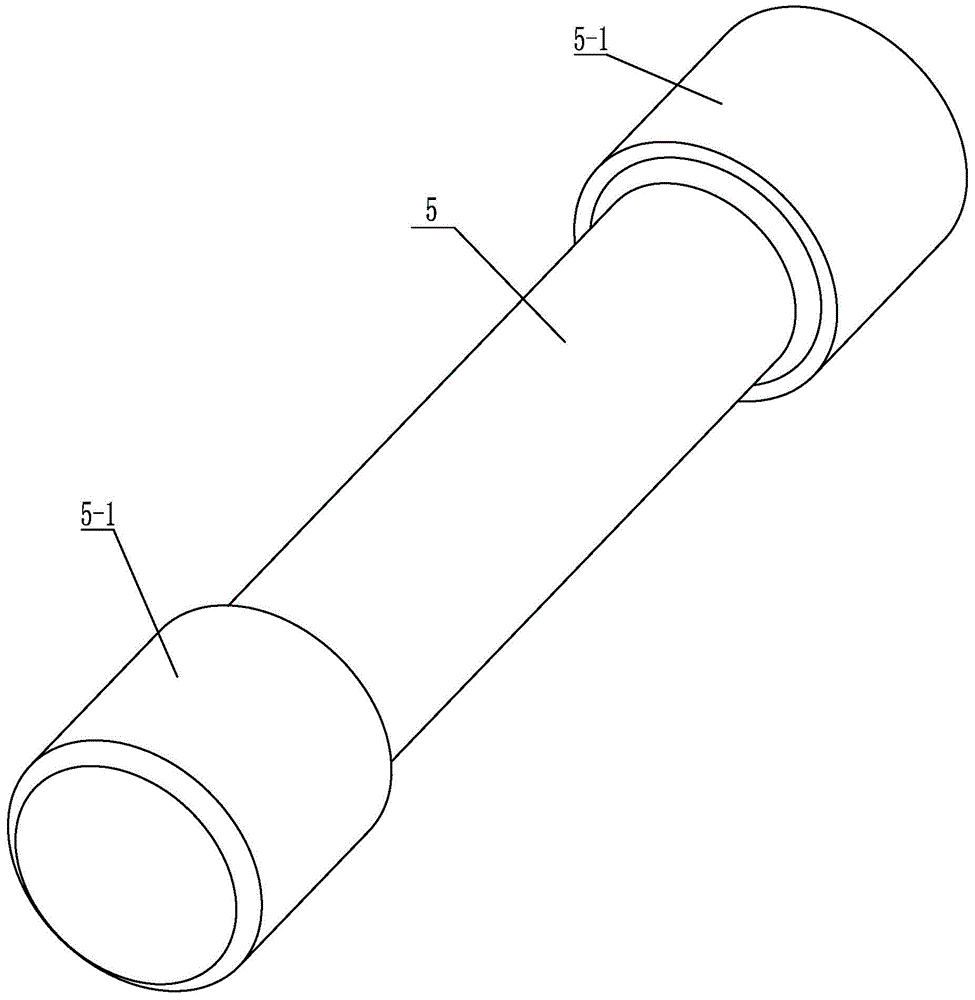
[0015] The N-stage propulsion machine jellyfish 1 are coaxially arranged in series, and the adjacent two-stage propulsion machine jellyfish 1 are connected by an interstage connecting shaft 5, and the interstage connecting shaft 5 is coaxial with the propulsion machine jellyfish 1, and one end of the interstage connecting shaft 5 is connected to the The first-stage propelling machine jellyfish 1 is connected to the abdominal cavity top cover 7, and the other end of the inter-stage connecting shaft 5 is connected to the abdominal cavity base 6 of another propelling robotic jellyfish 1;
[0016] Each stage of propulsion robot...
specific Embodiment approach 2
[0018] Specific implementation mode two: combination figure 1 Explain that the bionic flexible body 9 of this embodiment is made of silica gel. With such setting, the chemical properties are stable, and the mechanical strength is relatively high, which meets the design requirements and actual needs. Others are the same as in the first embodiment.
specific Embodiment approach 3
[0019] Specific implementation mode three: combination figure 1 Explain that the number of stages of propelling the robot jellyfish 1 described in this embodiment is 2. Such setting meets the design requirements and actual use. Others are the same as in the first or second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com