Monocular real-time target recognition and pose measurement method
A target recognition, pose measurement technology, applied in the field of computer vision, can solve the problem of high system complexity, achieve the effect of improving accuracy, reducing algorithm and system complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention is described in detail below in conjunction with accompanying drawing:
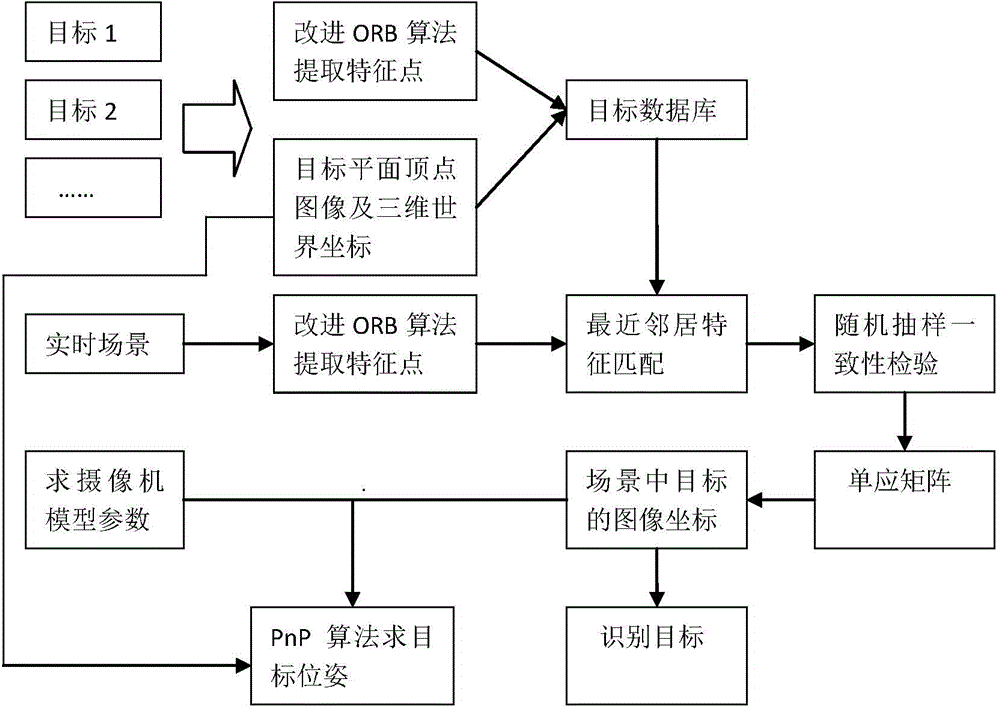
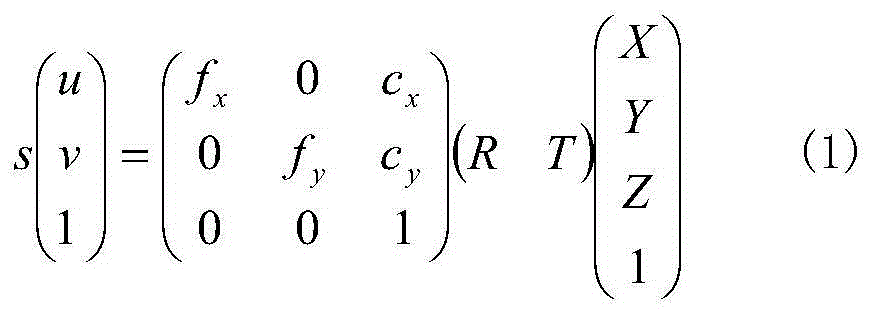
[0026] Such as figure 1 As shown, the present invention first utilizes the improved ORB algorithm to obtain the feature point data of the target object, and stores them in the target database together with the three-dimensional world coordinates and image coordinates of the four vertices of the target plane; then the camera is calibrated to obtain the camera model parameters; For the recognized target, the camera extracts the ORB feature points of the real-time scene, matches the feature points of the target image in the database with the feature points of the real-time scene, and removes the mismatch through random sampling consistency detection to obtain a stable homography matrix (Homography). The image coordinates of the four vertices of the target plane in the matrix and the database are obtained to obtain the image coordinates of the four vertices of the target in the sc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com