A Maneuvering Target Tracking Control System Based on Kalman Filter
A technology of maneuvering target tracking and control system, which is applied in the field of maneuvering target tracking and control system, and can solve the problems of reduced tracking accuracy and lost targets
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
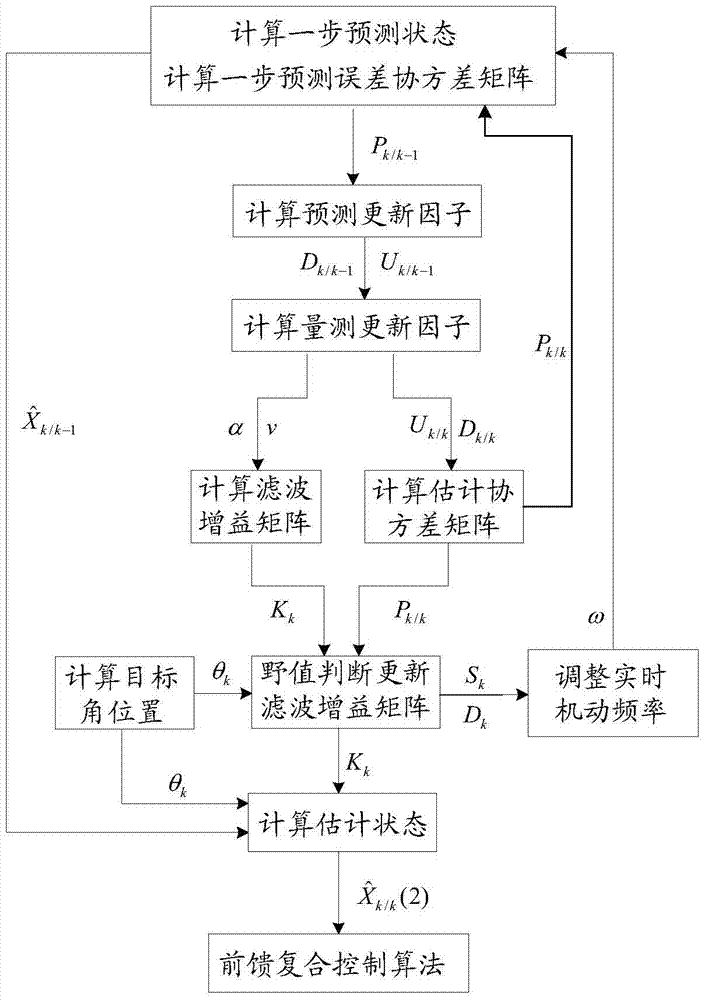
[0066] When the radio telemetry system is tracking the target, when the target maneuvers in a large range, due to the existence of dynamic lag, the tracking accuracy will be reduced or even the target may be lost. One of the ways to solve this problem is to develop a suitable target motion model. Through Kalman The filter algorithm estimates and predicts the target motion parameters and motion state. The present invention adopts the "current" statistical model as the target motion model, constructs target angular position, angular velocity, and angular acceleration observer, and realizes the maneuvering target Kalman filter algorithm in the antenna control unit. , using UD factorization to prevent Kalman filter divergence, using outlier rejection algorithm to reduce filtering error caused by measurement input, using maneuver frequency adaptive algorithm to improve the adaptation of Kalman filter algorithm based on "current" statistical model to maneuvering target tracking predic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com