Automatic vehicle-following device and method
A technology for automatic car following and vehicles, applied in control devices, vehicle parts, transportation and packaging, etc., can solve the problems that the reliability of automatic car following cannot be guaranteed, and achieve the effect of ensuring reliability and reducing driving fatigue
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
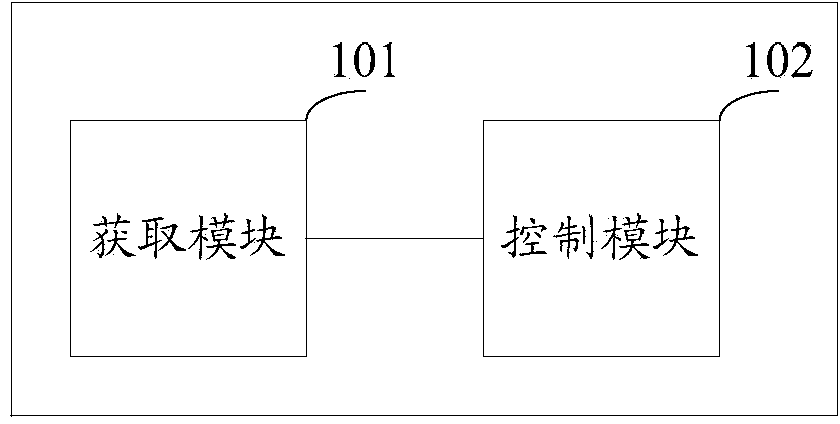
[0049] An embodiment of the present invention provides an automatic car-following device, see figure 1 , the device consists of:
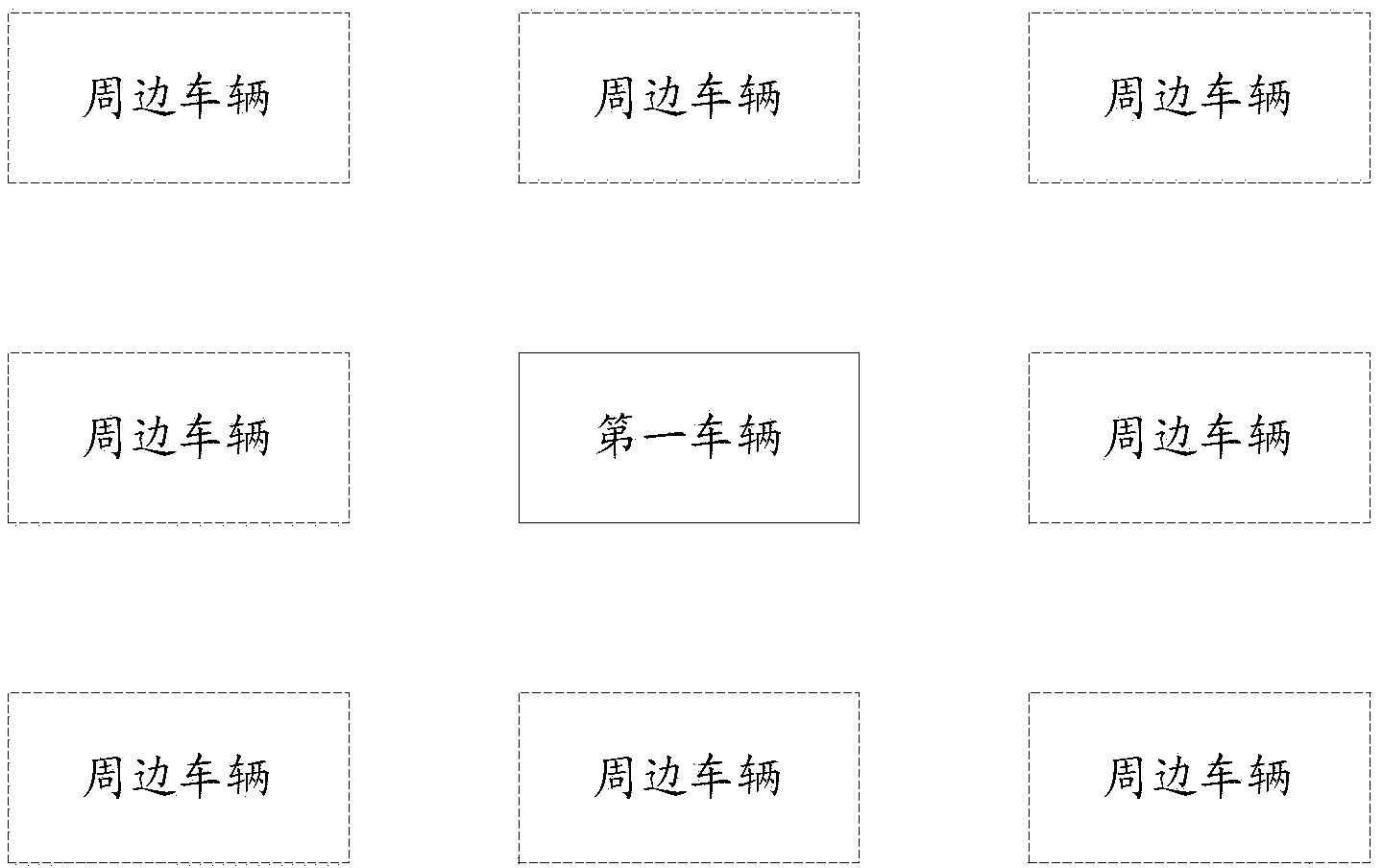
[0050] The acquiring module 101 is used to acquire the driving state of the surrounding vehicles, and determine the operation performed by the surrounding vehicles according to the driving state. The surrounding vehicles are vehicles within a set range around the first vehicle, and the driving state includes driving speed, gear position, braking One or more of usage conditions, engine running conditions, steering wheel steering, distance from the first vehicle, and driving trajectory, and the operation includes one of shifting D gear, shifting P gear, braking, starting the engine, and stopping the engine or more;
[0051] The control module 102 is configured to control the driving speed and steering wheel steering of the first vehicle according to the driving speed and steering wheel steering of the following vehicle after the automatic car follow...
Embodiment 2
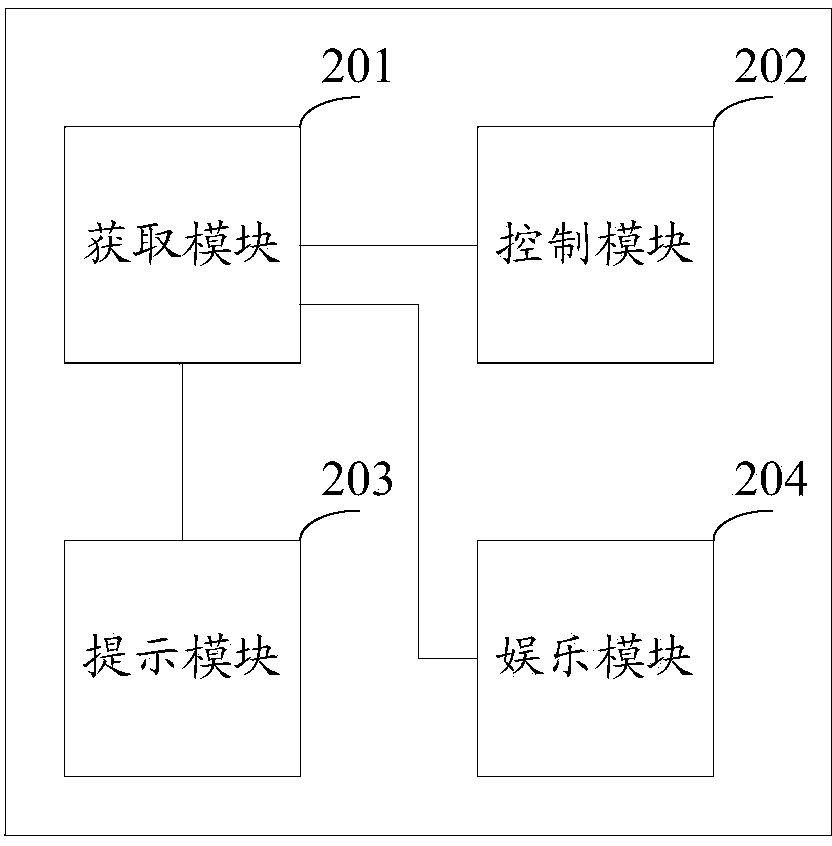
[0055] An embodiment of the present invention provides an automatic car-following device, see figure 2 , the device consists of:
[0056] The acquisition module 201 is used to acquire the driving state of the surrounding vehicles, and determine the operations performed by the surrounding vehicles according to the driving state. The surrounding vehicles are vehicles within a set range around the first vehicle, and the driving state includes driving speed, gear position, braking One or more of usage conditions, engine running conditions, steering wheel steering, distance from the first vehicle, and driving trajectory, and the operation includes one of shifting D gear, shifting P gear, braking, starting the engine, and stopping the engine or more;
[0057] The control module 202 is configured to control the driving speed and steering wheel steering of the first vehicle according to the driving speed and steering wheel steering of the following vehicle after the automatic car fo...
Embodiment 3
[0084] An embodiment of the present invention provides a method for automatically following a car, see Figure 4 , the method includes:
[0085] Step 301: Obtain the driving state of the surrounding vehicles, and determine the operations performed by the surrounding vehicles according to the driving state.
[0086] In this embodiment, the surrounding vehicles are vehicles within a set range around the first vehicle, and the driving state includes driving speed, gear position, brake usage, engine operation, steering wheel steering, distance from the first vehicle, driving One or more of the trajectories. The operation includes one or more of shifting the D gear, shifting the P gear, braking, starting the engine, and stopping the engine.
[0087] Step 302: After automatic car following is enabled, control the driving speed and steering wheel steering of the first vehicle according to the driving speed and steering wheel steering of the following object.
[0088] In this embod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com