A semi-wheeled robot
A robot and wheel-foot technology, applied in the field of robots, can solve the problems of low motion efficiency, complex control, high energy consumption, etc., and achieve the effect of improving fault tolerance, simple mechanical structure, and ensuring reliability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The technical solution of the present invention is further described below in conjunction with the accompanying drawings, but the scope of protection is not limited to the description.
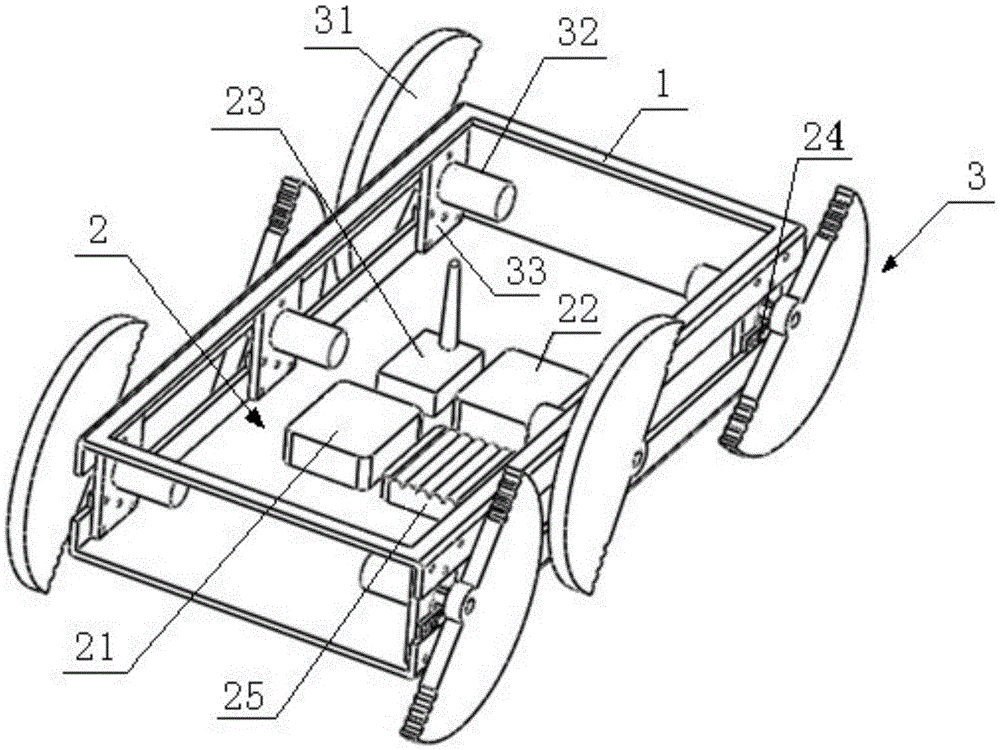
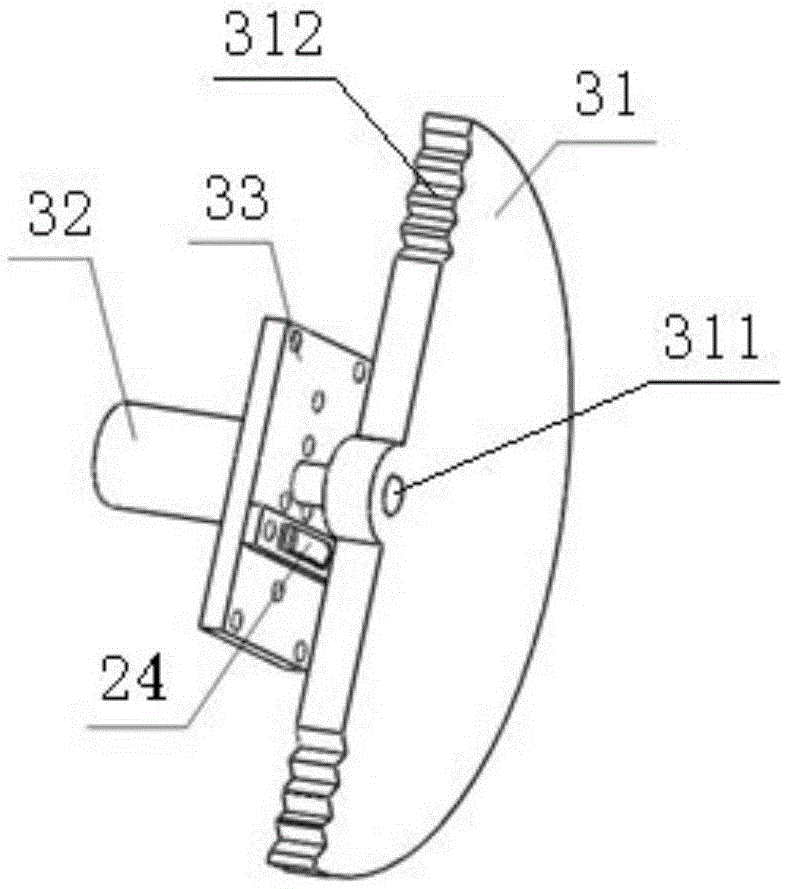
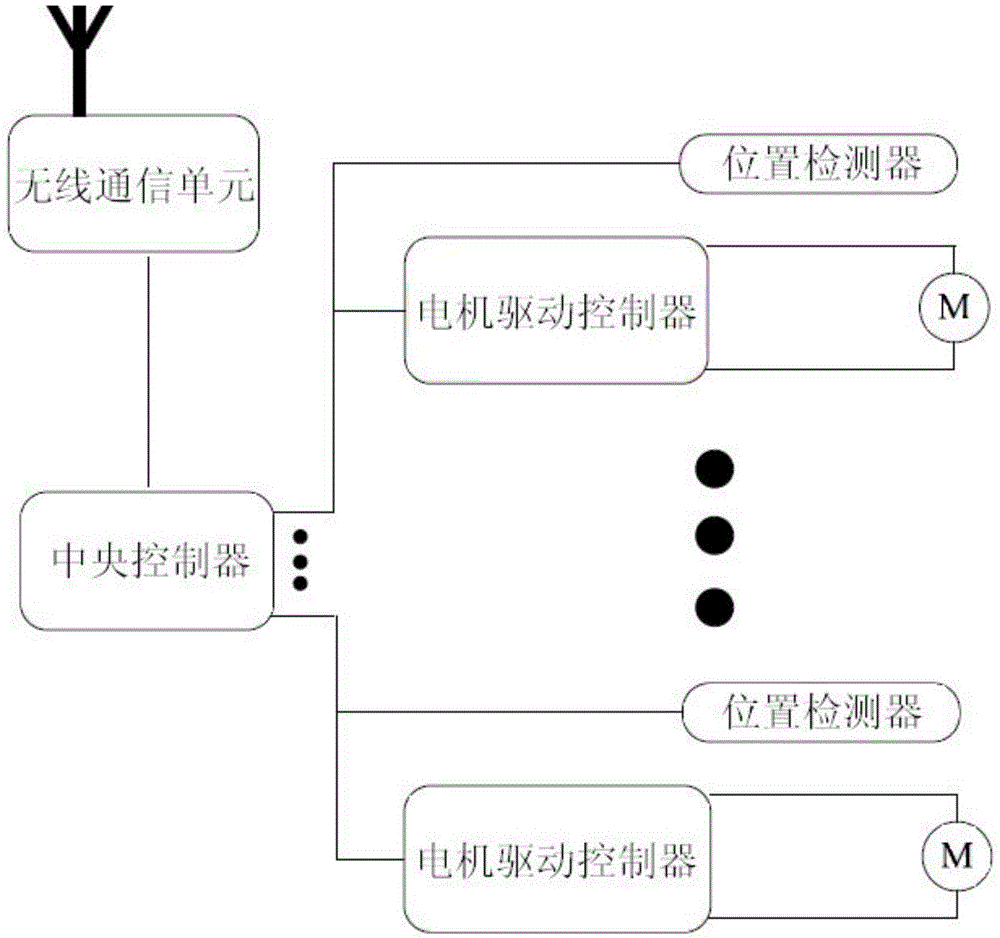
[0032] Such as figure 1 , figure 2 , image 3As shown, a semi-wheel-footed robot according to the present invention includes a body 1, a control system 2 installed inside the body 1, and a walking device 3 symmetrically installed on the side of the body 1, and the control system 2 includes a central controller 21. Motor drive controller 22, wireless communication unit 23, position detector 24 and battery 25; wherein, battery 25 is connected to central controller 21, motor drive controller 22, wireless communication unit 23 and position detector 24 respectively through power lines , used to provide energy for the whole robot; the central controller 21 is connected with the motor drive controller 22, the wireless communication unit 23 and the position detector 24 respectively by using ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com