Robot overall path planning method based on charge system search
A technology of global path planning and path planning, applied in two-dimensional position/channel control and other directions, which can solve the problem of high computational efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
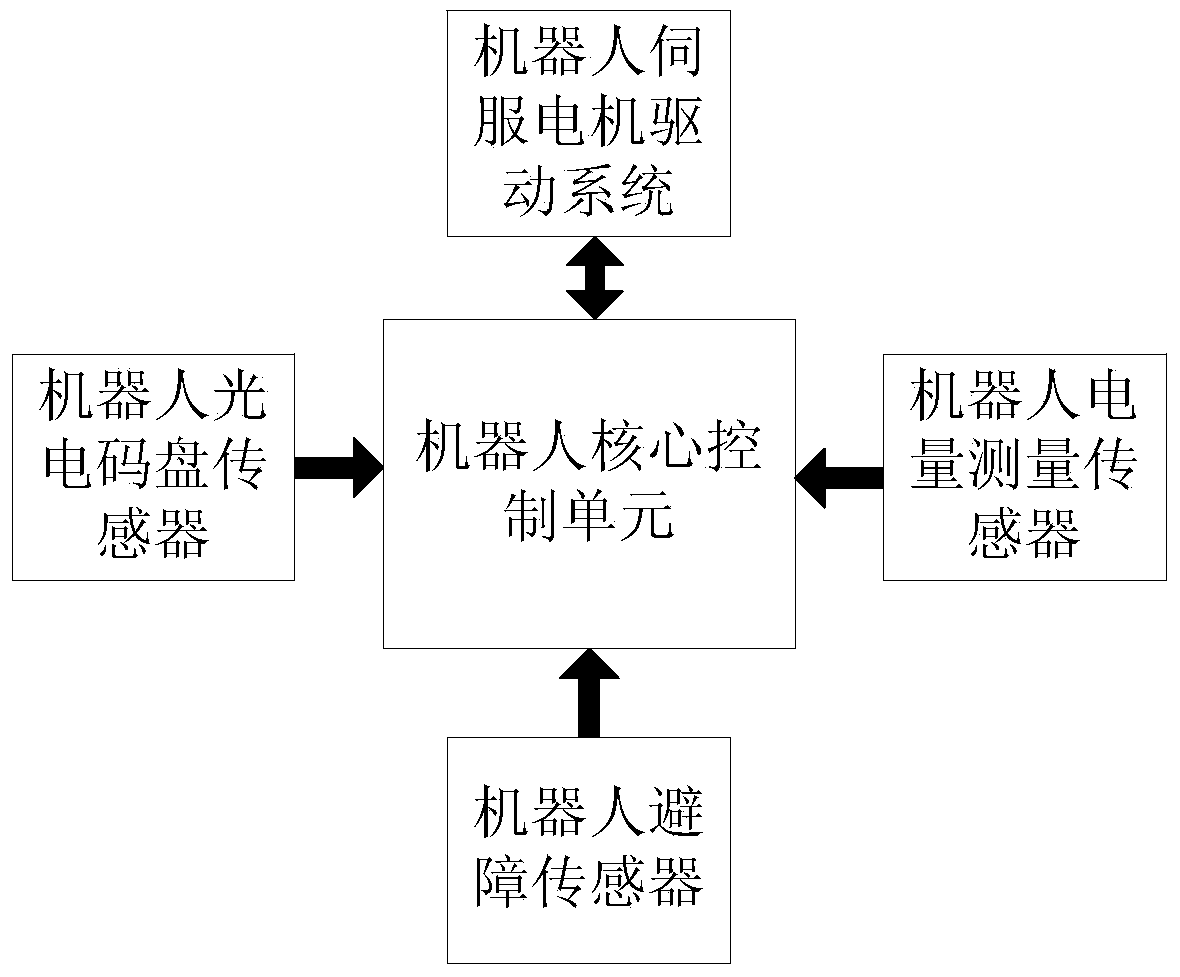
[0044] like figure 1 As shown, the principle of the robot system is that the core control unit of the robot is responsible for the motion control of the robot and the collection and processing of information from various sensors; the servo motor drive system of the robot receives the control signal from the core control unit to drive the motor of the robot; the power measurement sensor of the robot can measure the The current power, let the power of the robot at the initial position be E o , the electric quantity when reaching the target position is E f , then the energy consumed by the robot during operation E=E o -E f The obstacle avoidance sensor of the robot can measure the distance information of the obstacle in front of the robot in real time; the running speed of the robot can be measured by the photoelectric encoder sensor of the robot, and the distance information of the robot can be obtained by combining the running time of the robot.
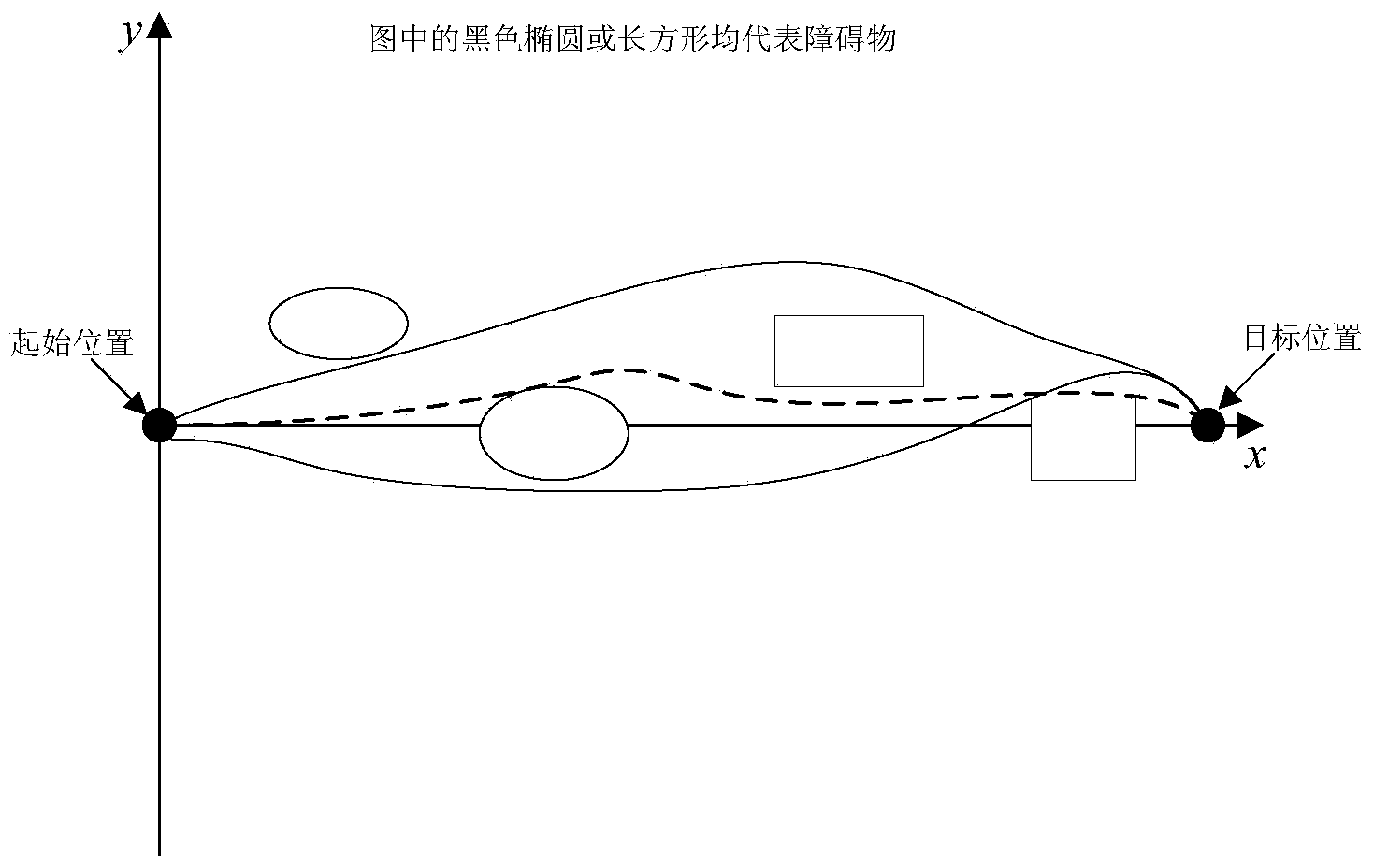
[0045] refer to figure 2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com