Multi-system fusing and positioning method and device
A technology integrating positioning and positioning systems, applied in the field of positioning, can solve the problems of large positioning result error, reduced Kalman filtering effect, inability to obtain noise prior information, etc., to achieve the effect of improving accuracy and avoiding low filtering efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
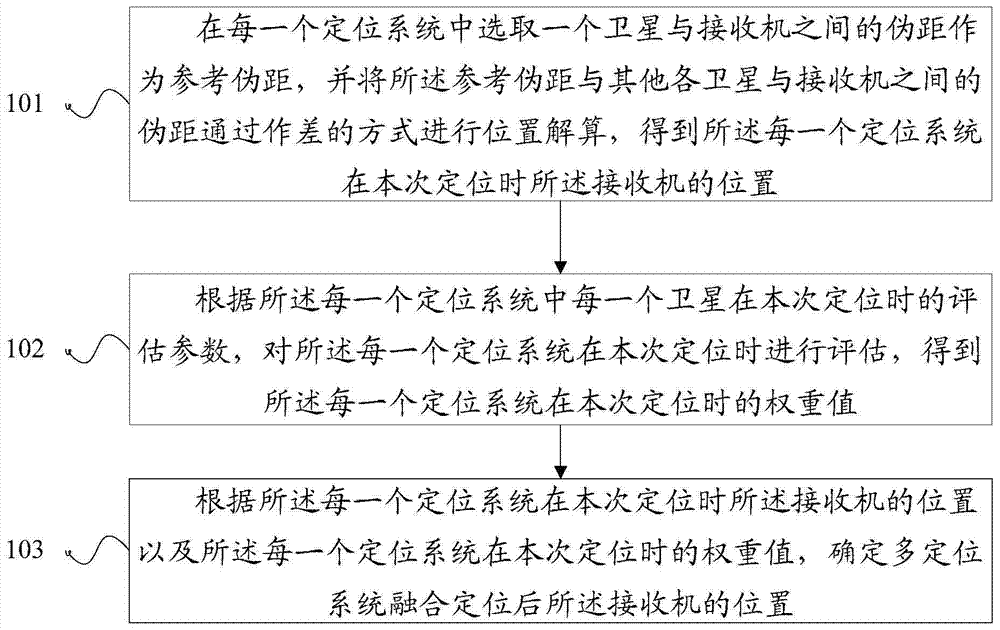
[0039] An embodiment of the present invention provides a method for fusion positioning of multiple positioning systems, see figure 1 , the method flow includes:
[0040] 101: In each positioning system, select a pseudo-range between a satellite and the receiver as a reference pseudo-range, and calculate the position by difference between the reference pseudo-range and the pseudo-ranges between other satellites and the receiver Solve the calculation to obtain the position of the receiver at the current positioning of each positioning system;
[0041] 102: According to the evaluation parameters of each satellite in each positioning system during the current positioning, evaluate each of the positioning systems during the current positioning, and obtain the current positioning of each of the positioning systems. Weights;
[0042] 103: Determine the position of the receiver after multi-positioning system fusion positioning according to the position of the receiver during the cur...
Embodiment 2
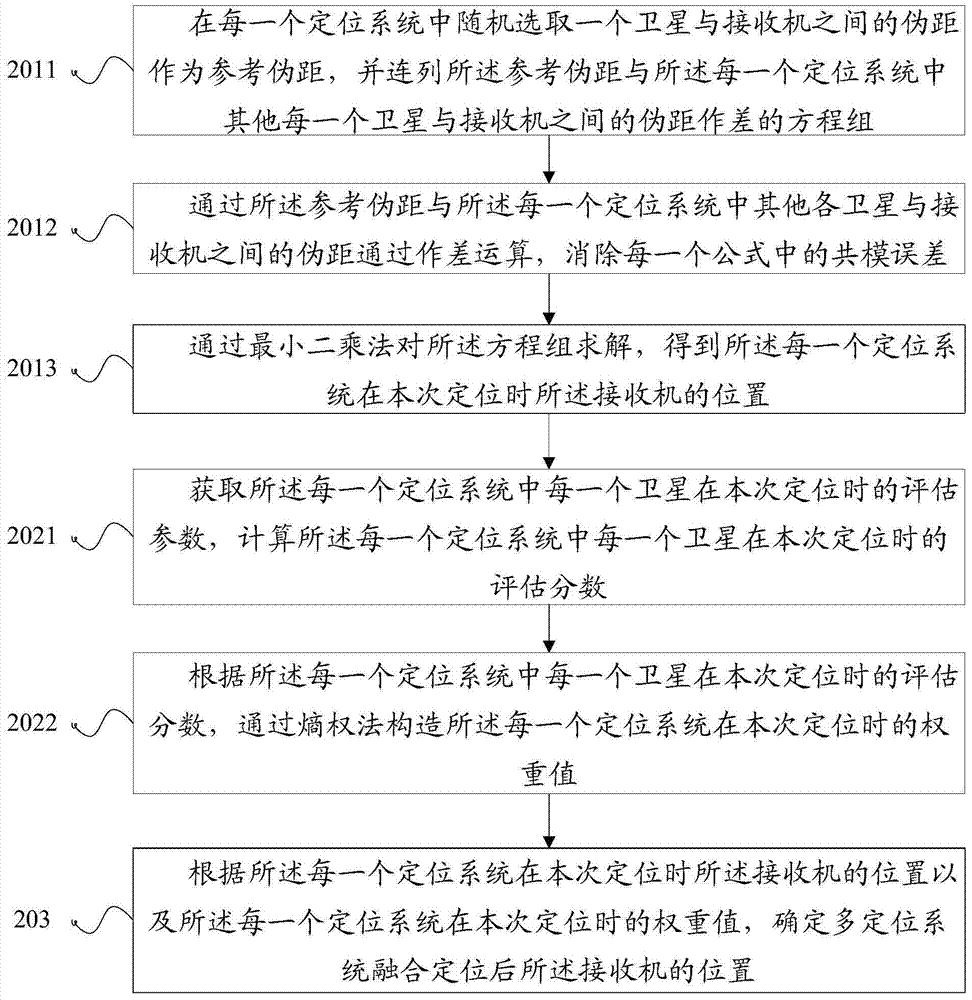
[0045] An embodiment of the present invention provides a method for fusion positioning of multiple positioning systems, see figure 2 , the method flow includes:
[0046] 201: In each positioning system, select a pseudo-range between a satellite and the receiver as a reference pseudo-range, and calculate the position by difference between the reference pseudo-range and the pseudo-ranges between other satellites and the receiver Solve and calculate to obtain the position of the receiver at the current positioning of each positioning system.
[0047] The formula for calculating the pseudo-range between each satellite and the receiver in any positioning system is as follows:
[0048] ρ i = ( x i - x u ) 2 + ...
Embodiment 3
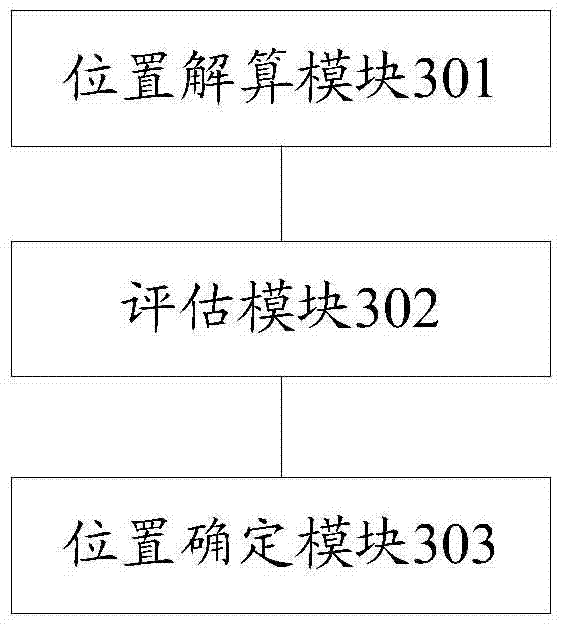
[0113] An embodiment of the present invention provides a multi-positioning system fusion positioning device, see image 3 , the device consists of:
[0114] The position calculation module 301 is used to select a pseudorange between a satellite and the receiver as a reference pseudorange in each positioning system, and pass the reference pseudorange and the pseudoranges between other satellites and the receiver through Performing position calculation in a differential manner to obtain the position of the receiver at the current positioning of each positioning system;
[0115] The evaluation module 302 is configured to evaluate each positioning system during the current positioning according to the evaluation parameters of each satellite in the positioning system during the current positioning, and obtain the current positioning of each positioning system. The weight value of the second positioning;
[0116] The position determination module 303 is configured to determine the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com