Rudder rolling stabilizing fuzzy controller with input constraint based on T-S model and control method thereof
A technology of fuzzy controller and rudder anti-rolling, which is applied in the direction of adaptive control, general control system, control/regulation system, etc. It can solve the problems of affecting the control effect, wear and damage of acceleration steering gear components, instability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0066] The present invention will be further described below in conjunction with the accompanying drawings.
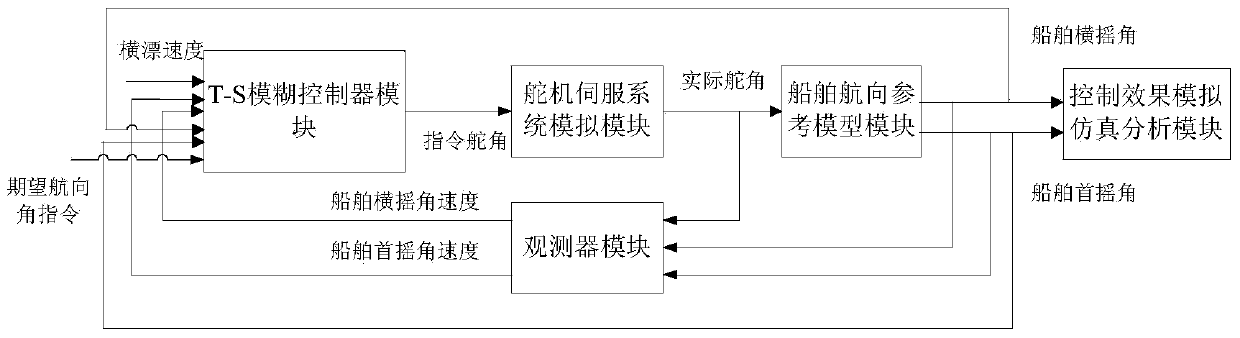
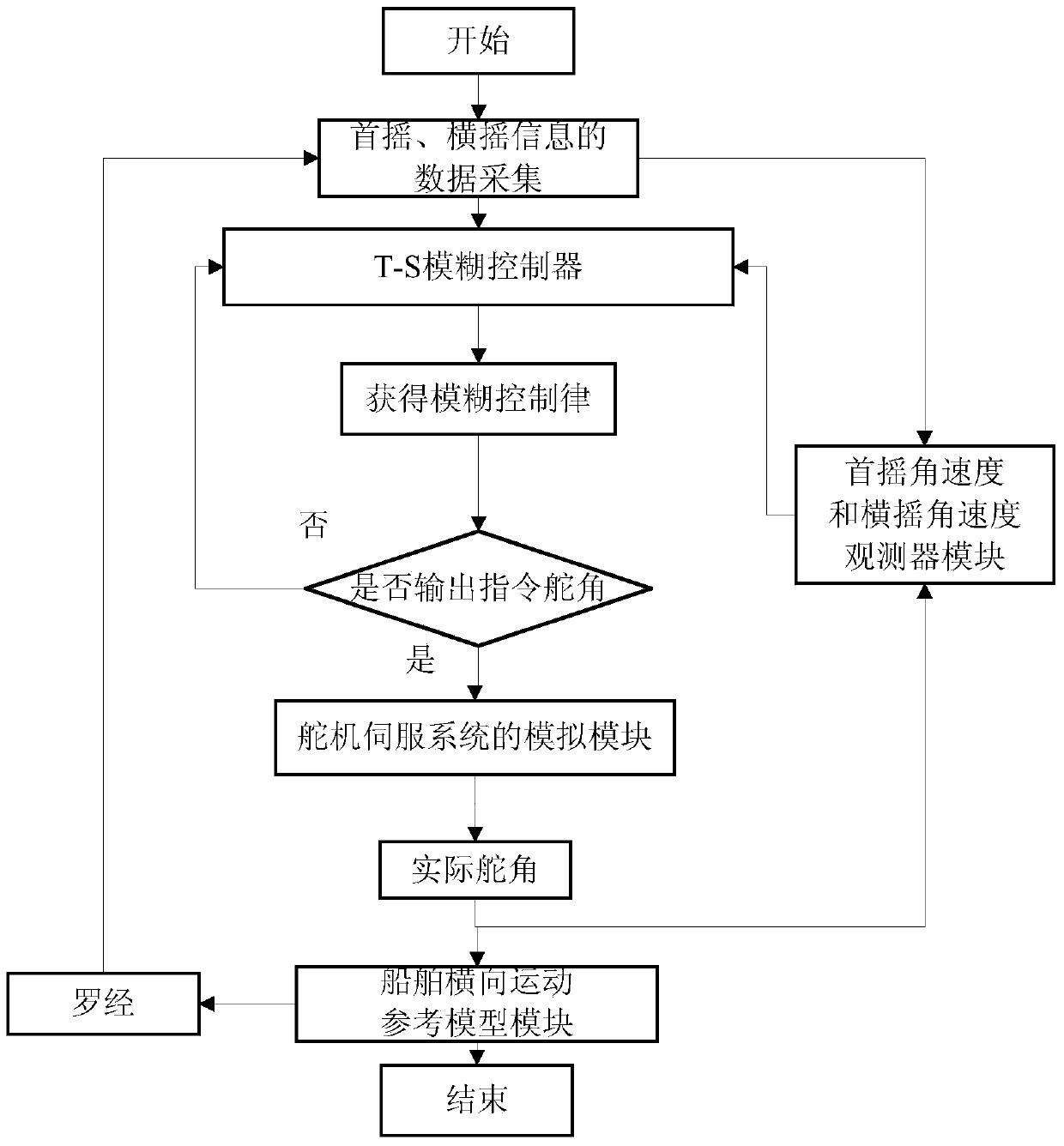
[0067] The invention mainly includes five modules: a T-S fuzzy controller module, a ship lateral motion reference model module, a yaw angular velocity and a roll angular velocity observer module, a steering gear servo system simulation module and a control effect simulation analysis module. The proposed control method has a clear idea, a clear and reasonable structure, and is easy to implement in engineering.
[0068] The invention comprises: a T-S fuzzy controller module, a reference model module of ship lateral motion, an observer module of yaw angular velocity and roll angular velocity, a simulation module of a steering gear servo system and a simulation analysis module of control effect. The T-S fuzzy controller module receives the measured roll angle signal, yaw angle signal, and the roll angle velocity signal, yaw angle velocity signal, and lateral drift velocity...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com