Round Mark point positioning method based on connected region filtering
A technology of connecting areas and positioning methods, applied in the fields of instruments, character and pattern recognition, computer parts, etc., can solve the problems of large computer memory requirements, low precision, and high process requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0027] Specific embodiment one: a kind of positioning method of the circular mark point based on connected area filtering in this embodiment is prepared according to the following steps:
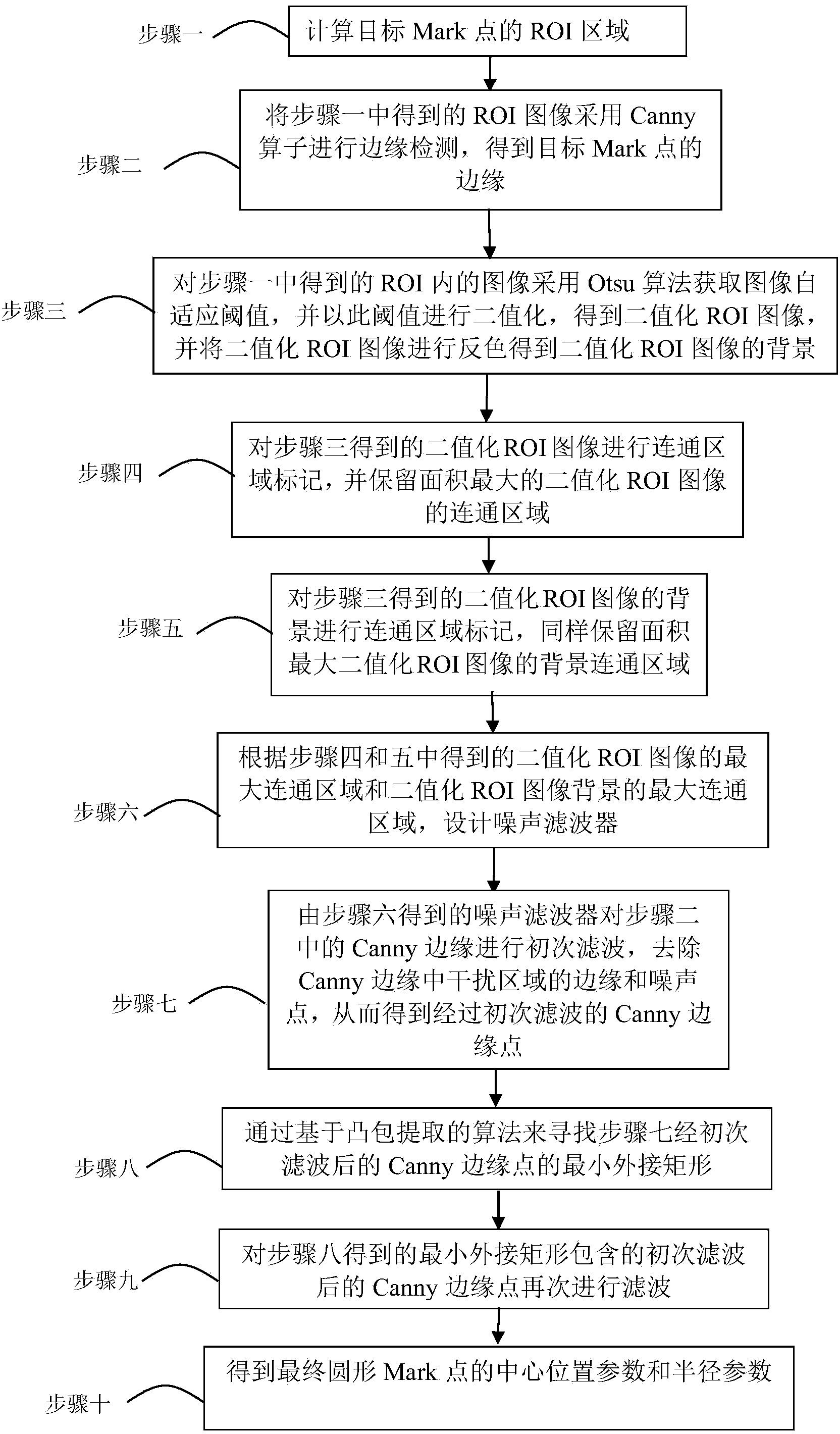
[0028] Step 1. Calculate the ROI (Region of Interest) area of the target Mark point, where the ROI area is the target area of interest; ROI reduces the size required for image calculation; in subsequent calculations, all calculations are performed in the ROI area of the image, thereby reducing image processing time;
[0029] Step 2, using the Canny operator to perform edge detection on the ROI image obtained in step 1, to obtain the edge of the target Mark point, the edge of the Mark point may also contain some edges and noise in the interference area;
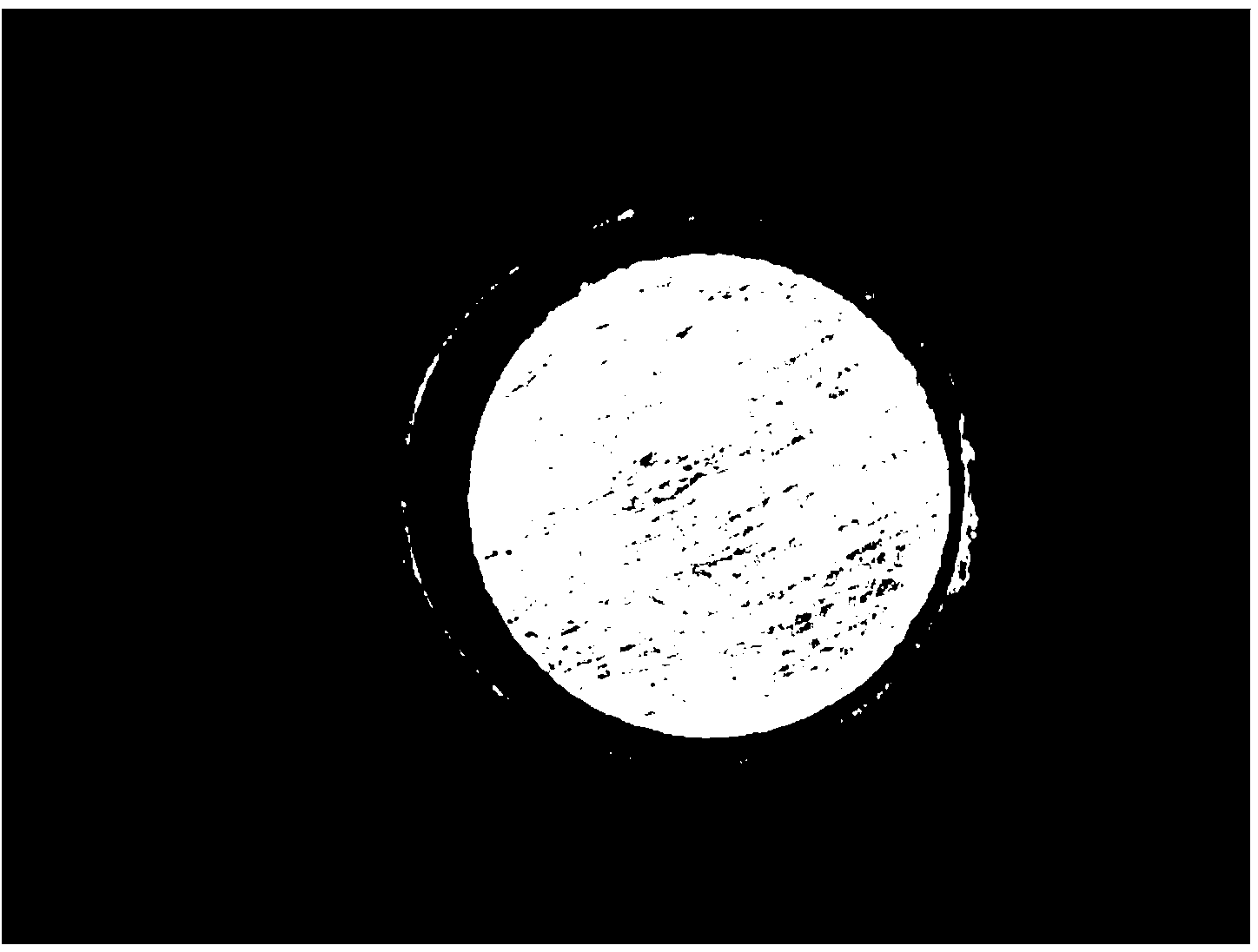
[0030] Step 3. Use the Otsu algorithm to obtain the image adaptive threshold for the image in the ROI obtained in step 1, and perform binarization with this threshold to obtain a binarized ROI image, and reverse the color of the bina...
specific Embodiment approach 2
[0040] Embodiment 2: The difference between this embodiment and Embodiment 1 is that the specific process of obtaining the background of the binarized image as described in step 3 and inverting the color of the binarized image is as follows:
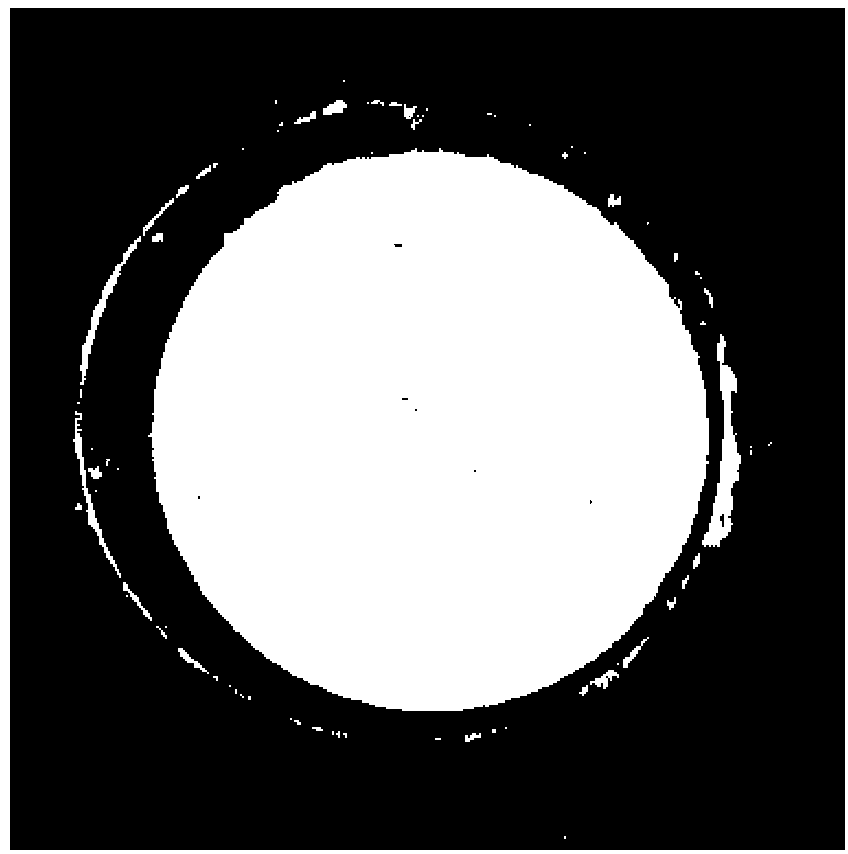
[0041] The background gray value of the binarized ROI image is reversed from 0 to 255, and then as the target to be processed, the connected region of the binarized ROI image is marked, and the connected region of the binarized ROI image with the largest area is reserved. Other steps and parameters are the same as those in Embodiment 1.
specific Embodiment approach 3
[0042] Specific implementation mode three: the difference between this implementation mode and specific implementation mode one or two is: in step 4, the process of obtaining the connected region of the binarized ROI image with the largest reserved area is:
[0043] (1) The ROI image is projected onto the abscissa and ordinate respectively;
[0044] (2) projected to the leftmost pixel of the maximum connected area of the binarized ROI image corresponding to the pixel of the minimum value of the abscissa;
[0045] (3) The pixel point projected to the maximum value of the abscissa corresponds to the rightmost pixel point of the maximum connected region of the binarized ROI image;
[0046] (4) The pixel point projected to the minimum value of the ordinate corresponds to the pixel point at the bottom of the maximum connected region of the binarized ROI image;
[0047] (5) The pixel point projected to the maximum value of the ordinate corresponds to the pixel point on the top of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com