Test platform and method for synchronous control over multiple mechanical arms
A synchronous control and experimental platform technology, applied in electrical testing/monitoring and other directions, can solve the problems of inability to complete synchronous control, coordinated control or consistent control network control algorithm testing, lack of openness and versatility, etc., to achieve flexible design and cost. Low, fast installation effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] Figures 1~7 is the best embodiment of the present invention, the following is combined with the appendix Figures 1~7 The present invention will be further described.
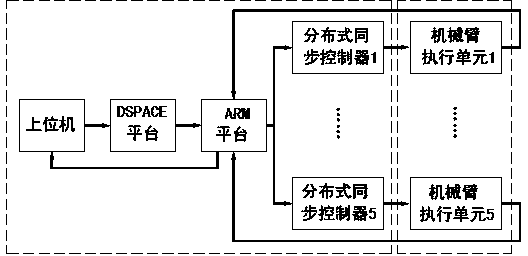
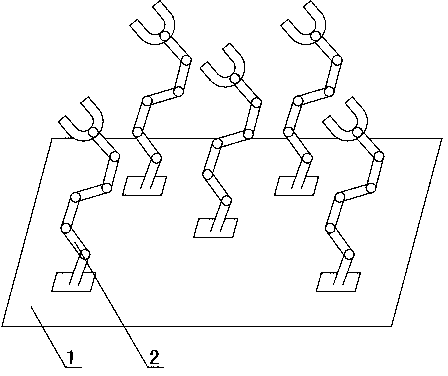
[0071] like Figure 1~Figure 2 As shown, the multi-manipulator synchronous control experimental platform of the present invention includes a simulation control unit and an execution unit connected with the simulation control unit to realize the synchronous control algorithm of the simulation control unit.
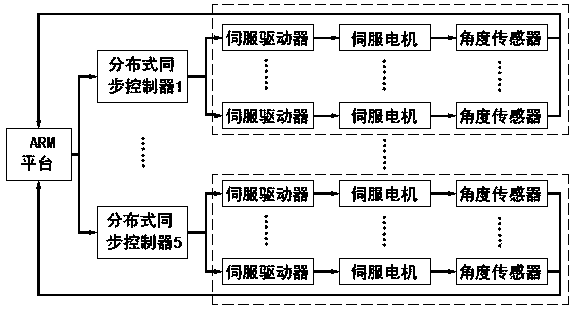
[0072] The simulation control unit includes the host computer, DSPACE platform, ARM platform and multiple distributed synchronous controllers. The upper computer is connected with the DSPACE platform, the DSPACE platform is connected with the ARM platform, the ARM platform is connected with a plurality of distributed synchronous controllers at the same time, and the ARM platform is directly connected with the upper computer at the same time. The execution unit is a robotic arm execution unit conne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com