A positioning method and device in a non-line-of-sight environment
A technology of a positioning device and a positioning method, applied in the computer field, can solve the problems of non-line-of-sight propagation and non-line-of-sight errors, and achieve the effect of improving positioning accuracy and reducing non-line-of-sight errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
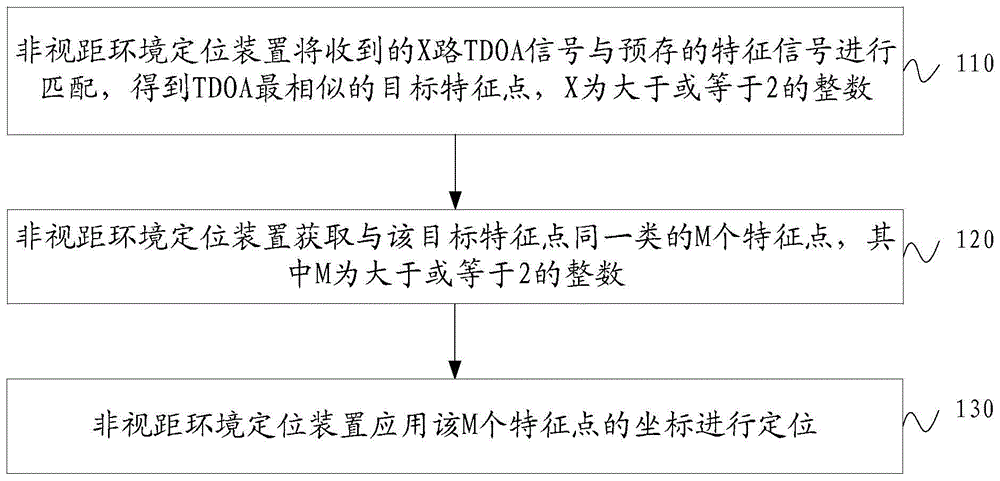
[0023] Such as figure 1 As shown, this embodiment provides a non-line-of-sight environment positioning method, including:
[0024] 110. The non-line-of-sight environment positioning device matches the received X-channel TDOA (time difference of arrival) signal with the pre-stored characteristic signal to obtain the target characteristic point most similar to TDOA, where X is an integer greater than or equal to 2.
[0025] 120. The non-line-of-sight environment positioning device acquires M feature points of the same type as the target feature point, where M is an integer greater than or equal to 2.
[0026] 130. The non-line-of-sight environment positioning device uses the coordinates of the M feature points for positioning.
[0027] The non-line-of-sight environment positioning device in this embodiment may be a positioning terminal, a computer terminal, a communication terminal, and the like.
[0028] The non-line-of-sight environment positioning method in the embodiment o...
Embodiment 2
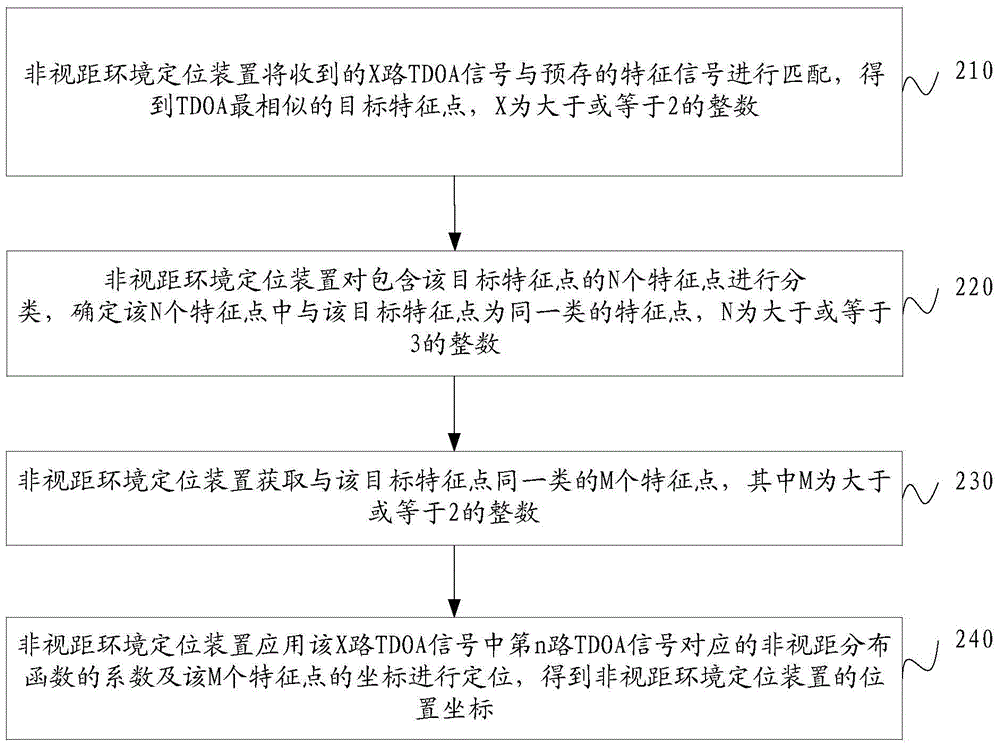
[0030] Such as figure 2 As shown, this embodiment provides a non-line-of-sight environment positioning method, including:
[0031] 210. The non-line-of-sight environment positioning device matches the received X-channel TDOA signal with the pre-stored feature signal to obtain the target feature point most similar to the TDOA, where X is an integer greater than or equal to 2.
[0032] Specifically, the multi-channel TDOA signals received by the non-line-of-sight environment positioning device are matched with the pre-stored feature signals to obtain the feature point most similar to TDOA, which is the target feature point.
[0033] And according to the feature point processing method of Embodiment 3, a total of M feature points of the same type as the target feature point are obtained.
[0034] 220. The non-line-of-sight environment positioning device classifies the N feature points including the target feature point, and determines feature points of the same type as the targ...
Embodiment 3
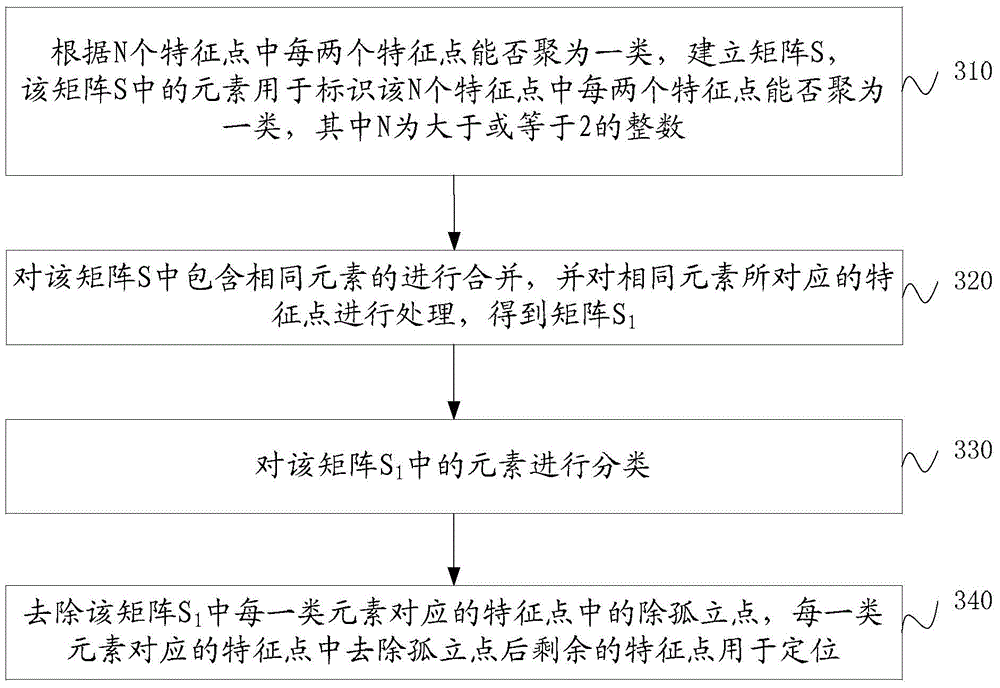
[0061] Such as image 3 As shown, this embodiment provides a feature point processing method, including:
[0062] 310. According to whether every two feature points among the N feature points can be clustered into one class, a matrix S is established, and the elements in the matrix S are used to identify whether every two feature points among the N feature points can be clustered into one class , where N is an integer greater than or equal to 2.
[0063] In this embodiment, it can be based on
[0064]
[0065] Determine whether every two feature points among the N feature points can be clustered into one class. If formula (1) is established, then the corresponding two feature points among the N feature points can be clustered into one class, otherwise they cannot be clustered into one class kind.
[0066] where n is the noise system,
[0067]
[0068] c is the speed of light, (x 1 ,y 1 ,z 1 ) is the coordinate of feature point 1, (x 2 ,y 2 ,z 2 ) is the coordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com