Underwater Multi-Target Tracking Method
A multi-target tracking and target technology, which is applied to the underwater multi-target tracking of the improved resampling non-expanding and tasteless particle filter algorithm, and the underwater multi-target tracking field, which can solve unfavorable real-time applications, long calculation time, multi-particle count, etc. problem, to achieve the effect of reducing computational complexity, avoiding positioning blind spots, and increasing area area
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
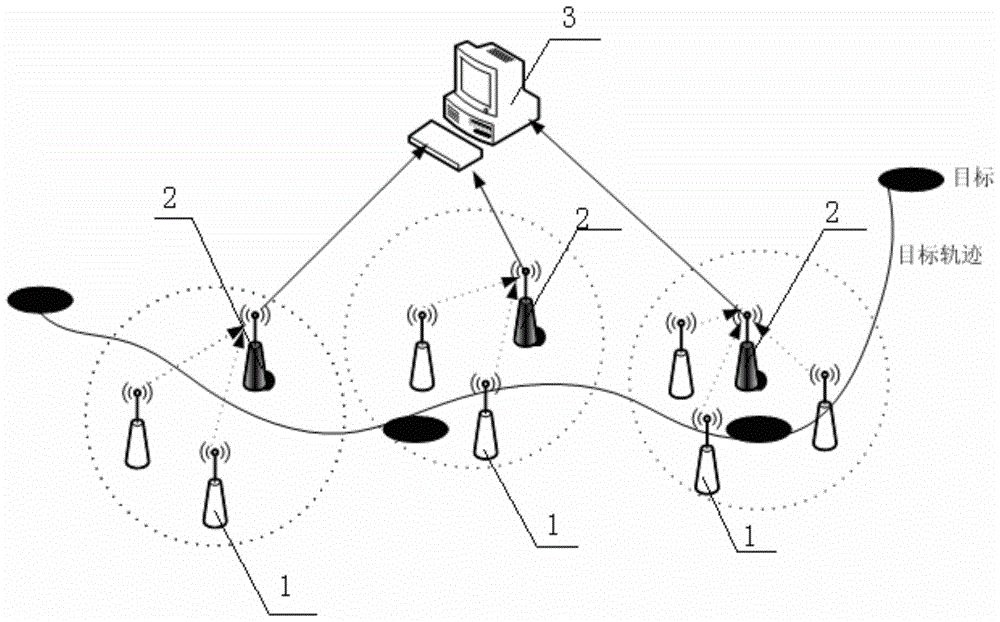
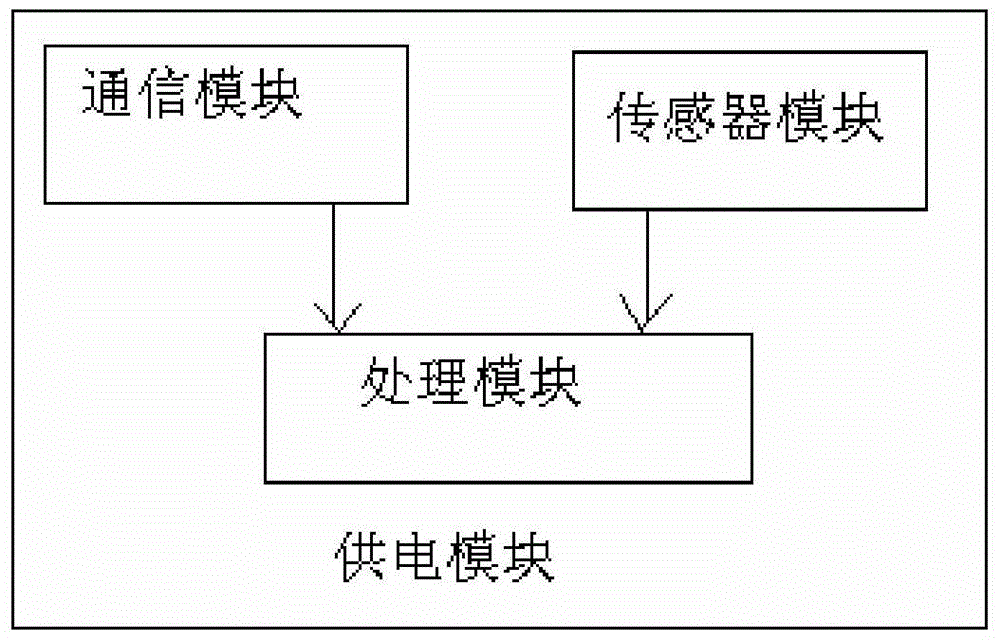
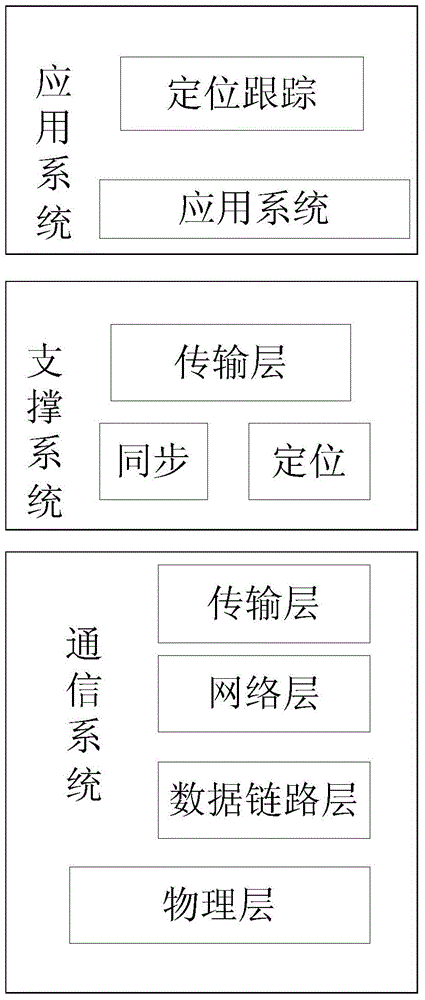
[0031] The configuration of the positioning system, the principle of the positioning algorithm and the multi-target data fusion algorithm adopted in the present invention will be systematically described below. The whole positioning system is mainly composed of the following parts: sensor node 1, cluster head node 2, control system 3, such as figure 1 shown. The positioning algorithm adopts the improved resampling non-expanding dimensionless particle filter algorithm to realize the positioning of the target. The specific embodiments of the present invention are introduced below from three aspects of system configuration, positioning algorithm and multi-sensor data fusion.
[0032] 1. System configuration:
[0033] Based on the system configuration based on the sensor network, the invention adopts an improved re-sampling non-dimensional expan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com