Method for achieving coordinated flight of multiple unmanned aerial vehicles
A multi-UAV and flight mission technology, applied in the direction of three-dimensional position/channel control, etc., can solve problems such as limited functions, and achieve the effects of improving efficiency, autonomy, and good robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The technical solution adopted by the present invention is to introduce the bee colony flight rules into multi-UAV cooperative flight to achieve better multi-UAV cooperative flight performance, and design the leading aircraft to lead the search and follow the aircraft to solve the problem of multi-person cooperative flight. Following the flight, a multi-UAV swarm flight method is proposed, and a new multi-UAV collaborative method is obtained.
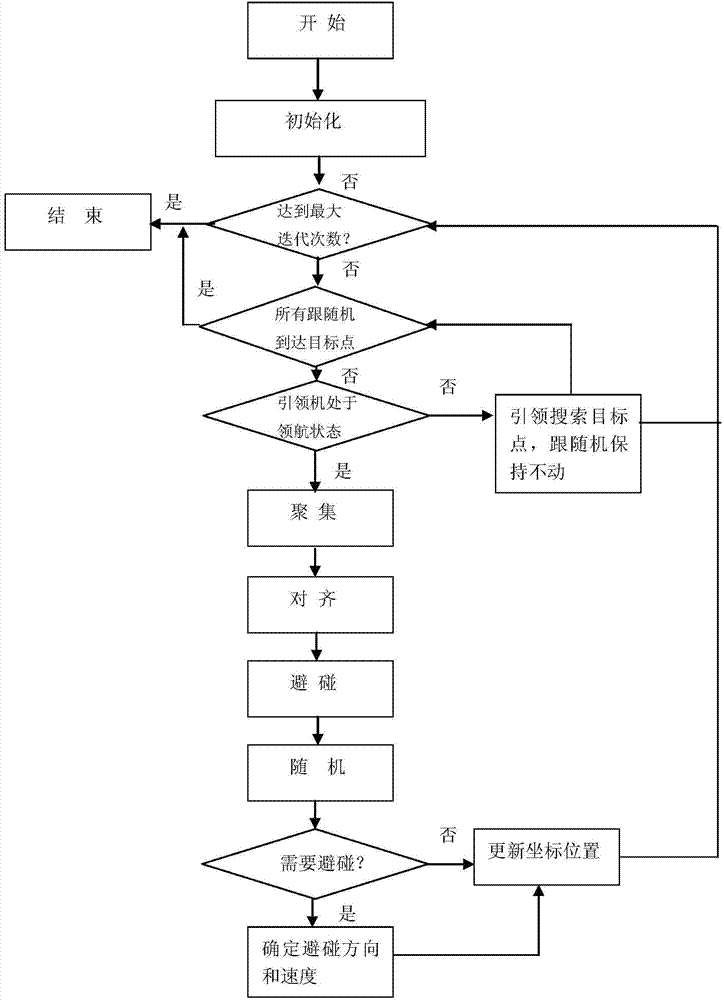
[0035] refer to figure 1 , the specific implementation steps of the present invention are as follows:
[0036] The basic idea of the realization is to simulate the flight of each bee in the bee colony in nature will be affected by the flight status of its neighbor bees. The four basic rules of swarm flight are as follows:
[0037] Aggregation rule: Describes the tendency of bees to form a population by assuming that a bee tends to move towards the center of the individuals around it.
[0038] Alignment rule: Describes that b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com