A multi-model generalized predictive control system and its control method based on dynamic optimization
A generalized predictive control and dynamic optimization technology, applied in general control systems, control/regulation systems, adaptive control, etc., can solve problems such as multi-model matching, and achieve the effects of eliminating interference, improving adjustment capabilities, and improving transient performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
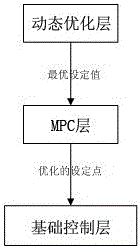
[0102] The S1 dynamic optimization layer is set as the following process mathematical model:
[0103]
[0104]
[0105]
[0106] x(0)=[300] T ,0≤δ(k)≤30,k∈[0,k f ] (11)
[0107] In the formula, f is the economic objective function, x A ,x B are two parameters related to the key variable δ(k).
[0108] Divide the time interval into the same 10 segments, and then set the PSO parameter to set the number of particles to m=10, dimension D=10, and learning factor c 1 =2,c 2 =2, the maximum number of iterations is 500. The set value of the key variable is obtained through dynamic optimization, and this set value is used as the reference trajectory of the multi-model generalized predictive controller.
[0109] The S2MPC layer controlled object is expressed as:
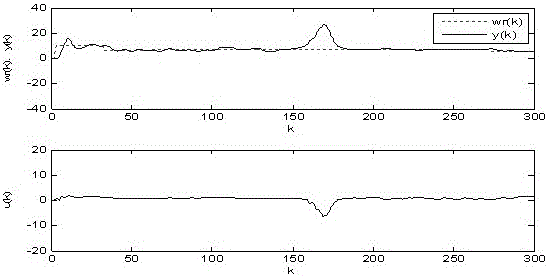
[0110] y(k)+a 1 y(k-1)+a 2 y(k-2)=b 1 u(k-1)+b 2 u(k-2)+ξ(k) / Δ
[0111] The number of control steps is taken as 300, a 1 =-1.8, a 2 =1.2,b 1 =1,b 2 =2, the system parameters jump at step 150. jump to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com