Robot path planning method based on coevolution particle swarm rolling optimization
A technology of co-evolution and rolling optimization, applied in the direction of instruments, non-electric variable control, position/direction control, etc., can solve problems such as deadlock
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
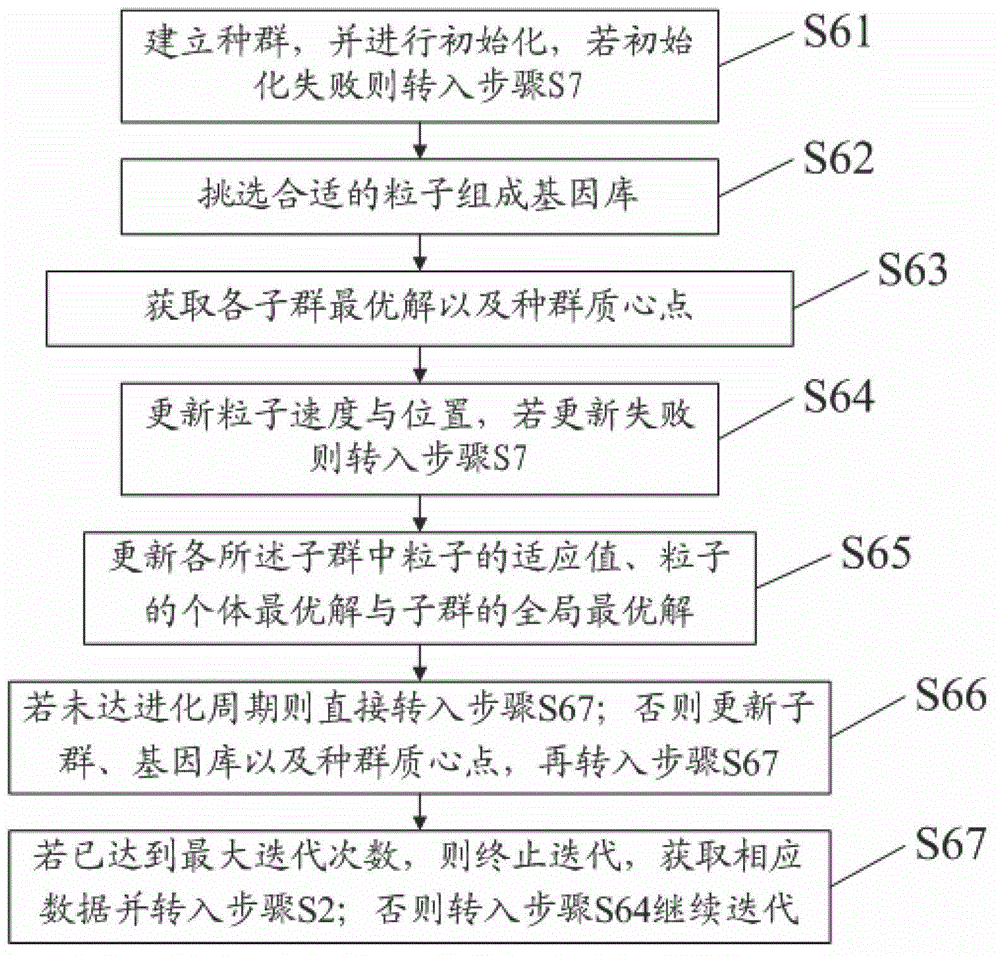
[0086] Such as figure 1 As shown, the robot path planning method based on co-evolutionary particle swarm optimization is used to plan the walking path of a robot so that the robot can avoid several static obstacles in the working environment, including the following steps:
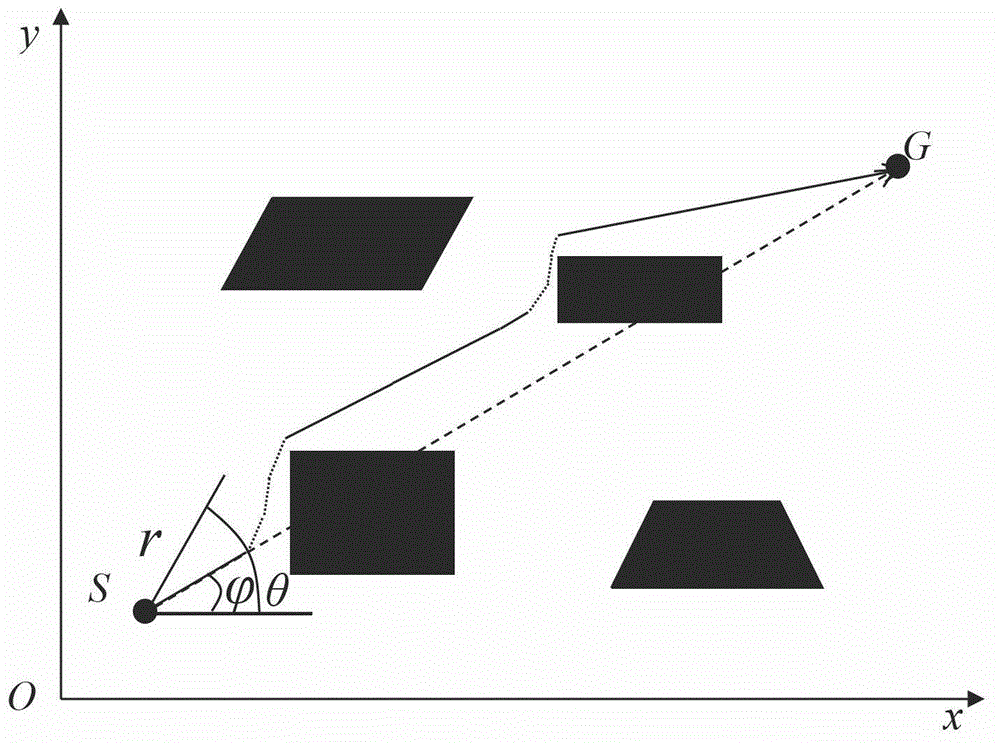
[0087] Step S1, modeling the working environment, such as image 3 As shown, it specifically includes the following steps:
[0088] Step S11, ignoring the height information in the working environment, and establishing a two-dimensional coordinate system. This step ignores the height information of the robot and obstacles, and describes the working environment of the robot as a two-dimensional bounded environment.
[0089] Step S12, set the field of view of the robot as (r, θ), where r is the radius of the field of view, and θ is the angle of view; obtain the coordinates of the starting point S and the target point G of the robot; describe the obstacle with a convex polygon in the two-dimensional coordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com