Bionic robot fish propelled by oscillating and twisting compound motion of pectoral fins
A compound motion and robotic fish technology, applied in the field of mechanical bionics, can solve the problems of high dependence on the surrounding environment, low controllability of fin surface deformation, and few principle prototypes, achieving high controllable swing and improving fixed-point stability And maneuverability, the effect of a large range of controllable swing frequency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0035] The present invention will be further described in detail below in conjunction with the accompanying drawings.
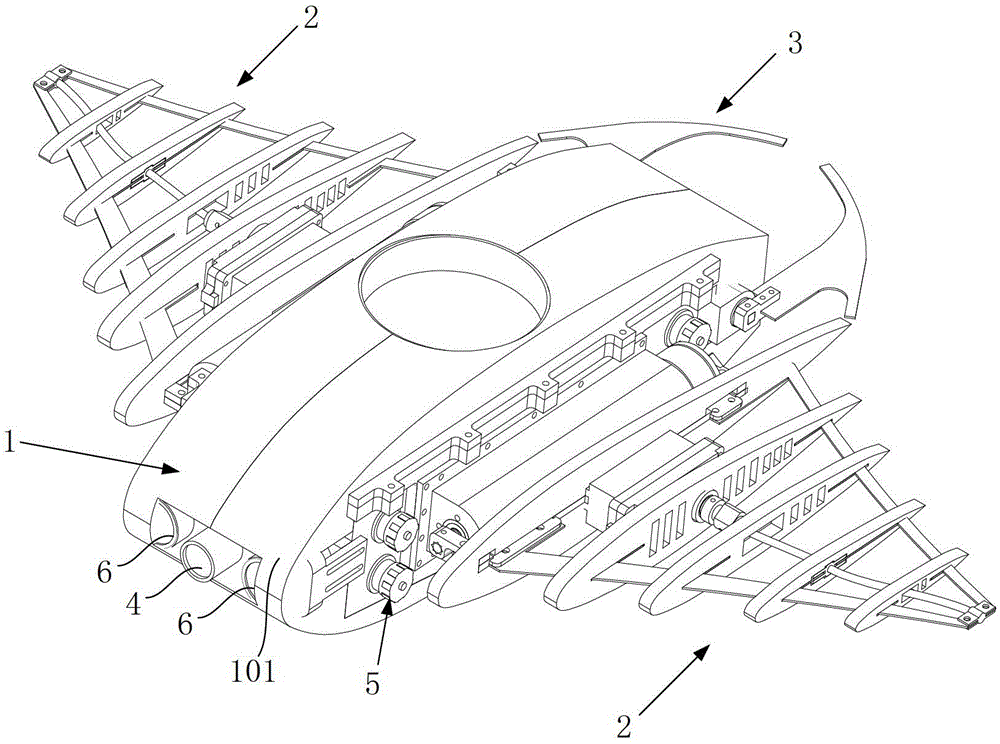
[0036] The bionic robotic fish of the present invention comprises a body 1, swing pectoral fins 2 installed on both sides of the body 1 and a tail 3 installed behind the body 1, as figure 1 , figure 2 shown.
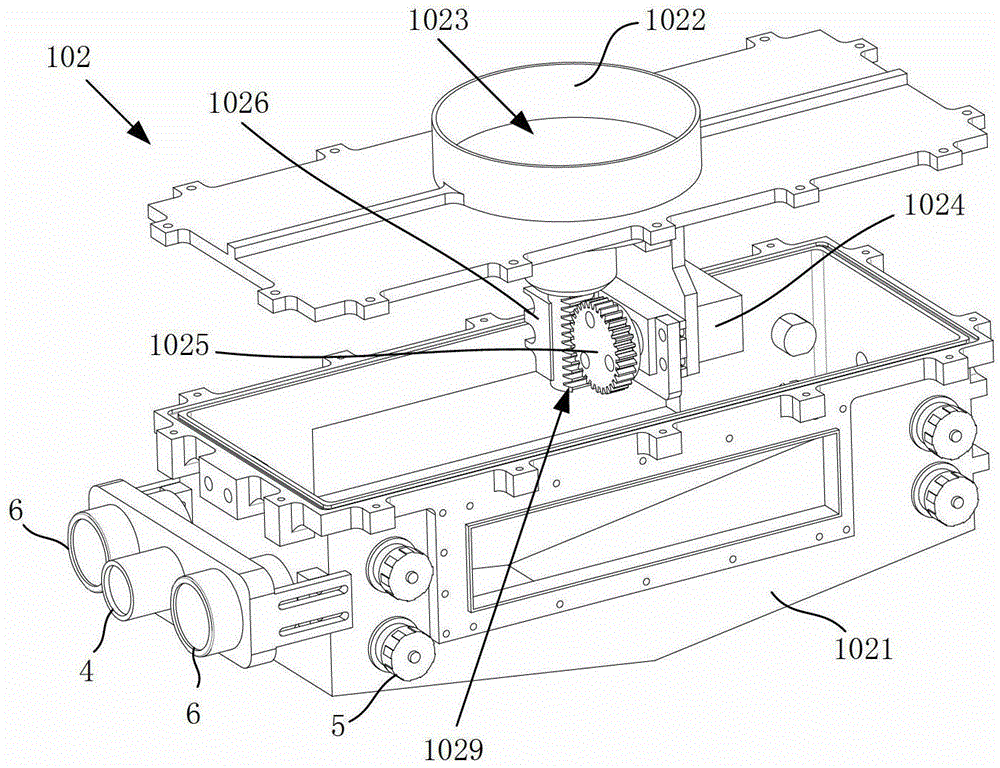
[0037] Wherein, the body 1 includes a body shell 101 and a floating and sinking mechanism 102 fixedly installed in the body shell 101; in order to better conform to the prototype of the ray fish, the body shell 101 is designed as an elliptical longitudinal section in the present invention, and its front and rear The direction is the long axis, so that the body shell 101 has a streamlined external configuration with a smooth transition, which can improve the propulsion performance of the bionic robotic fish in a fluid environment. The floating and sinking mechanism 102 includes a sealed housing 1021, a floating and sinking cylinder 1022, a piston 1023...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com