Cam-type negative pressure adsorption wall-climbing robot
A wall-climbing robot and cam-type technology are applied in the field of wall-climbing robots, which can solve the problems of difficult control, complex structure and limited working range, and achieve the effects of expanding the working range, large working range and convenient control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
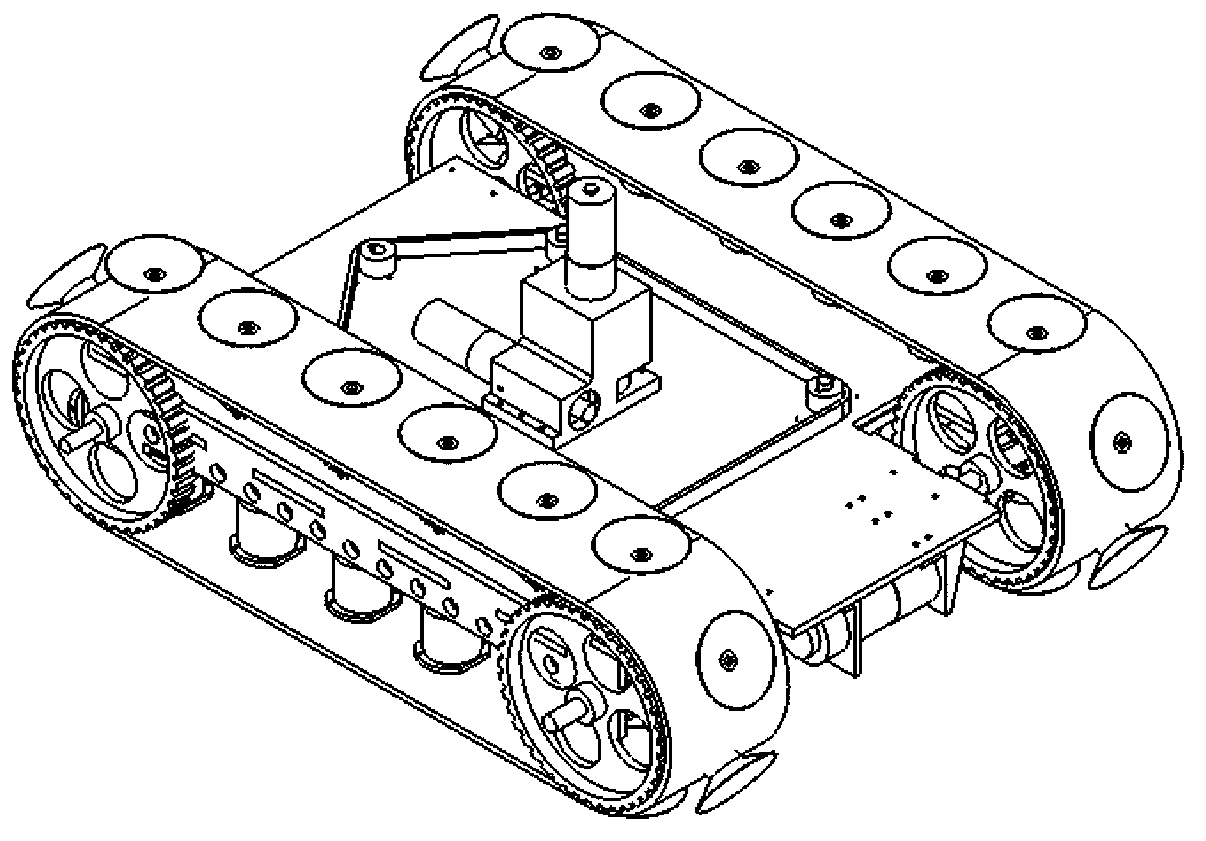
[0027] This embodiment is a cam-type negative pressure adsorption wall-climbing robot, which is composed of an adsorption moving mechanism, an adsorption steering mechanism, a steering auxiliary mechanism, and a main base plate of a frame.
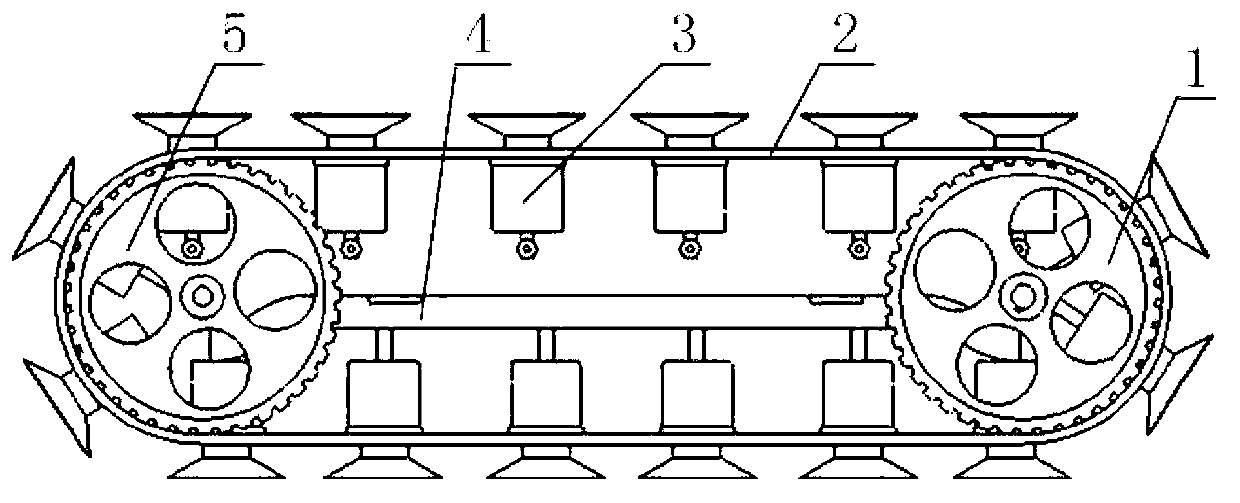
[0028] refer to figure 1 , figure 2 , the adsorption moving mechanism includes two main driving wheels 1, two slave driving wheels 5, moving crawlers 2, a plurality of moving adsorption assemblies 3 and cam track grooves 4, the driving wheels are installed on both sides of the moving crawlers 2, and the moving The adsorption assembly 3 is located at the middle part of the crawler belt 2 for moving, and the cam track groove is fixedly connected with the frame main base plate 39 through the connecting beam 48 and the transmission screw rod 52. Concentric with drive wheel 5. The mobile suction assembly 3 is fixed on the crawler belt through the positioning hole on the crawler belt 2, and the axis of the bearing pin on the mobile suction as...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com