Lead-screw-utilized twisting machine hand claw with fixed wiring harness position
A robot hand and screw technology, applied in the direction of manipulator, circuit/collector parts, electrical components, etc., can solve the problem of wiring harness twisting and other problems, achieve precise assembly, improve production efficiency and product quality, and reduce labor requirements. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
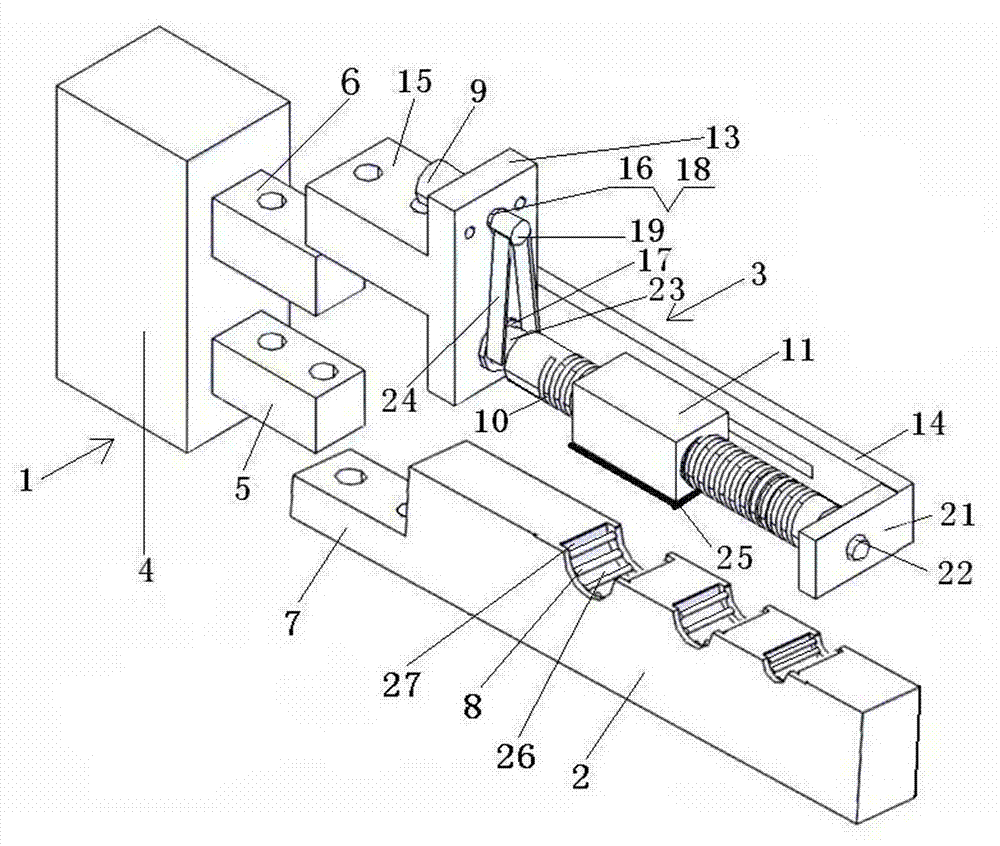
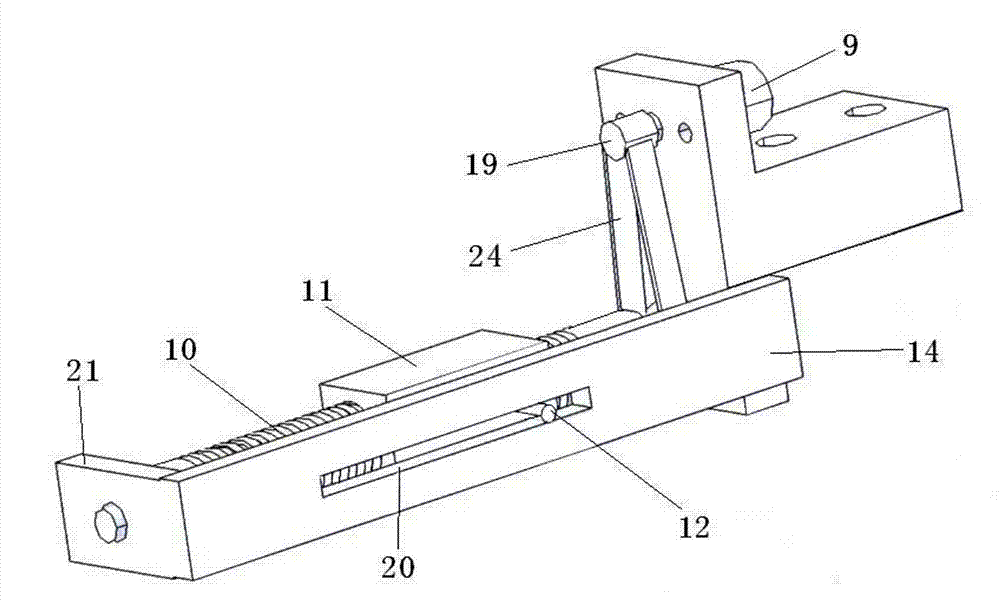
[0015] A wire harness position fixation utilizes a lead screw to rub the gripper of a robot, including a manipulator 1, a parallel motion finger 2 and a rubbing finger 3;
[0016] Manipulator comprises manipulator base 4, parallel motion finger base 5 and rubbing finger base 6, and the left end of rubbing finger base 6 is fixed on the right end face of manipulator base 4; Parallel motion finger base 5 is installed on the manipulator. The right end surface of the base 4 is located below the rubbing finger base 6, and is parallel to the rubbing finger base 6, and the parallel movement finger base 5 can move up and down in parallel with respect to the rubbing finger base 6 , is a known technology;
[0017] The left end of the parallel movement finger 2 is integrally provided with a movement finger connecting plate 7, the movement finger connection plate 7 is arranged below the parallel movement finger base 5, and is connected with the parallel movement finger base 5 by bolts, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com