Six-foot obstacle crossing robot with limb self-cutting function and control system thereof
A robot and functional technology, applied in the field of robotics, can solve problems such as it is difficult to cross over one's own height, the robot is in trouble, and the control is difficult, so as to improve stability and practicability, improve survivability, system complexity and control difficulty Reduced effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be described in detail below in conjunction with the accompanying drawings.
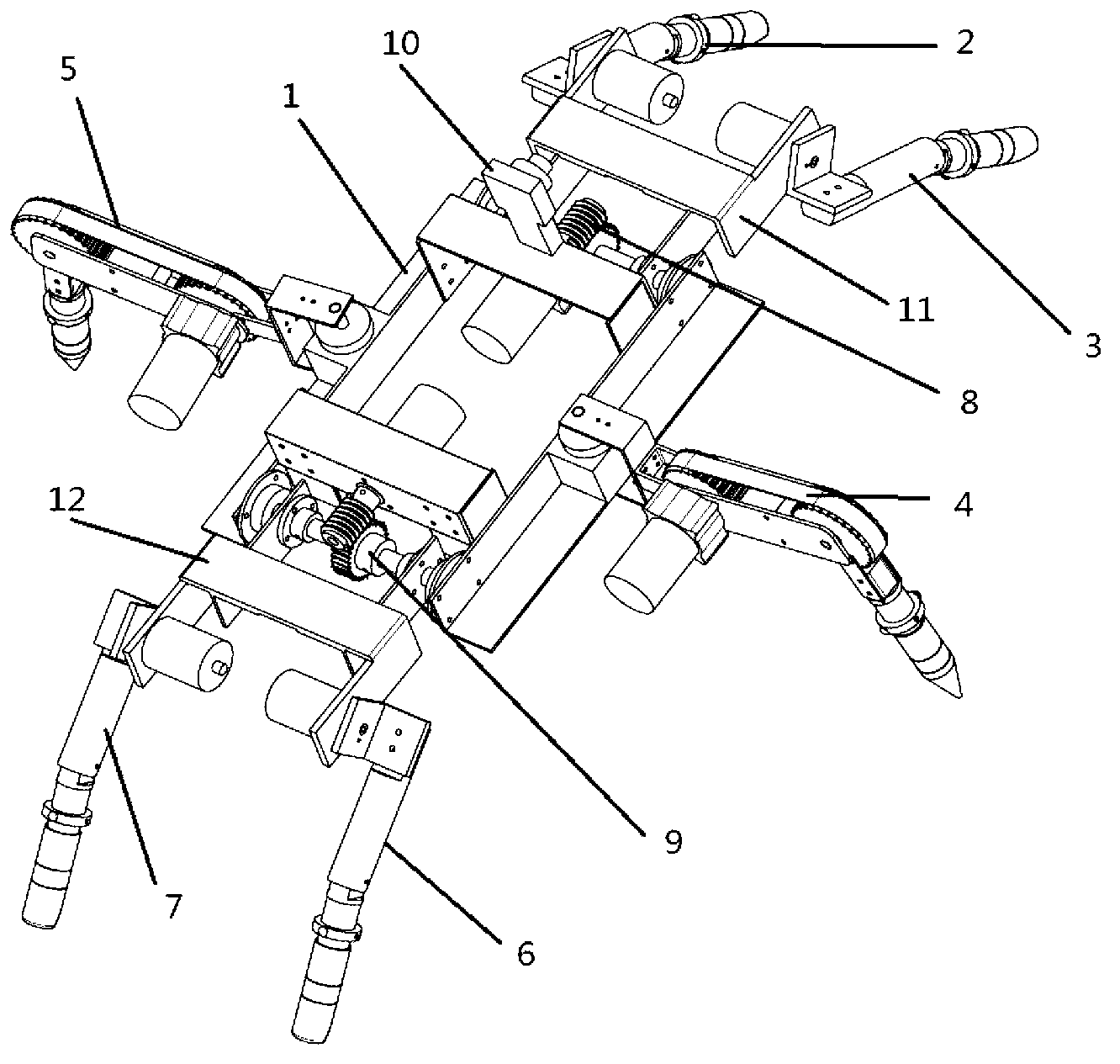
[0049] figure 1It is the structural diagram of the whole machine of the present invention, and it can be seen that a hexapod obstacle-surmounting robot with self-severing limb function of the present invention includes a whole machine support 1, two front feet 2, 3 with torsion springs capable of one-way bending , two middle feet 4, 5 driven by synchronous belts, two rear feet 6, 7 capable of one-way bending with torsion springs and rotatable front waist 8 and rear waist 9;
[0050] Wherein, two front feet 2, 3 are connected to the front part of the whole machine support 1 through the front bracket 11 and the front waist 8, two middle feet 4, 5 are installed on both sides of the whole machine support 1, and two rear feet 6, 7 pass through the rear The support 12 and the rear waist 9 are connected to the rear of the complete machine support 1;
[0051] The middle pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com