AUV (autonomous underwater vehicle) integrated navigation method integrating Kalman filtering and particle filtering
A Kalman filter and combined navigation technology, applied in navigation, mapping and navigation, instruments, etc., can solve problems such as convergence decline, blindness of particle selection, divergence, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
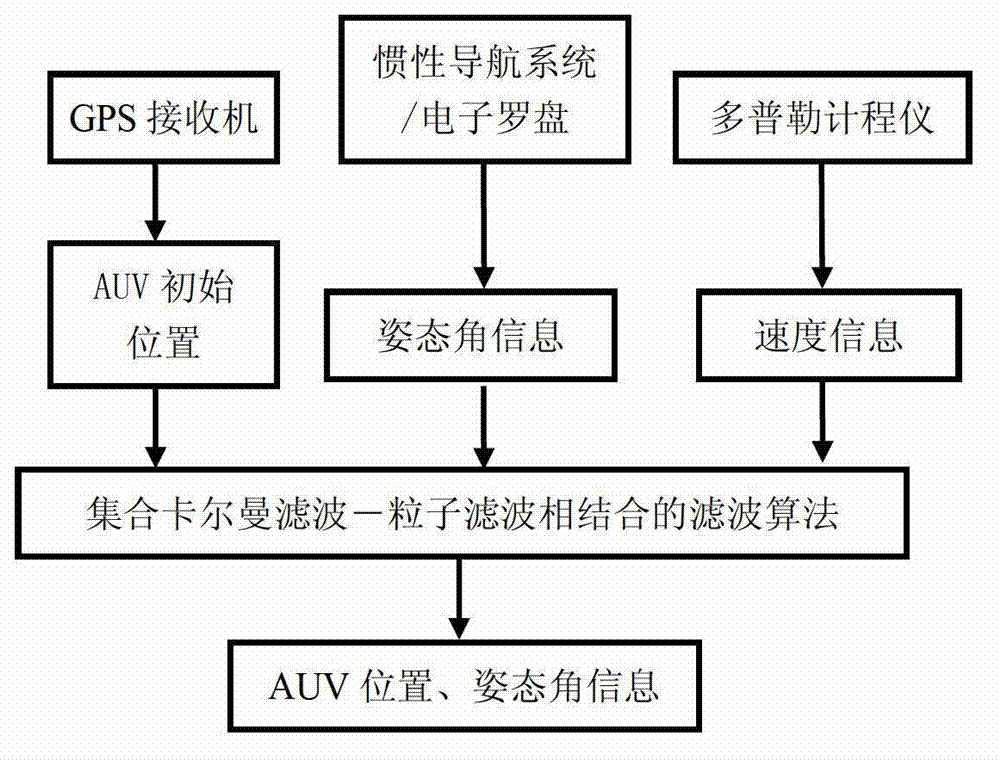
[0098] In practical applications, AUV vertical dimension depth estimation usually directly estimates depth information through pressure sensors. The following examples use the AUV lake test navigation data to analyze the positioning algorithm of the two-dimensional horizontal plane. In the field test, first use the GPS installed on the AUV to obtain the initial position information of the AUV, then use the three-dimensional electronic compass to collect the yaw angle information, the inertial navigation system collects the angular acceleration information of the yaw angle, and the AUV yaw angle information collected by the Doppler log The forward speed and lateral speed information can be used to calculate the position information of the AUV at each moment and obtain the trajectory of the AUV. Figure 5 , Figure 6 and Figure 7 The data processing results of three voyages of AUV navigation using the EnKPF method of the present invention are given, and analyzed and compared w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com