Path planning algorithm of mowing robot
A lawn mowing robot and path planning technology, applied in cutters, harvesters, agricultural machinery and implements, etc., can solve the problems of large battery capacity, low work efficiency, no path planning, etc., and achieve high mowing efficiency and repetition rate. The effect of low, high return path efficiency
Inactive Publication Date: 2012-09-12
慈溪思达电子科技有限公司
View PDF4 Cites 79 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0004] 2. There is no path planning, and the random walking method is adopted, so the work efficiency is low;
[0005] 3. The battery capacity is large, and the working lawn area is small
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
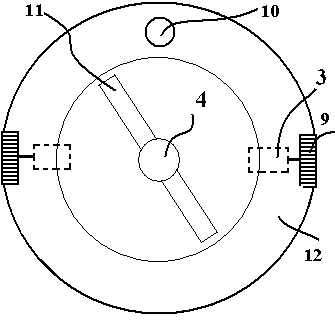
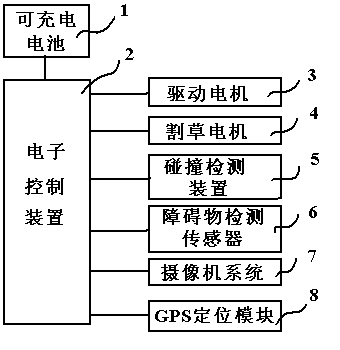
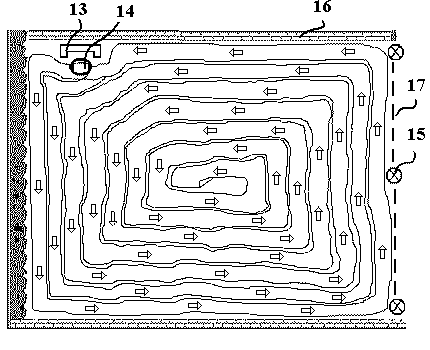
The invention discloses a path planning algorithm of a mowing robot. The mowing robot comprises an electronic control device, a camera system and a GPS (Global Position System) positioning module, wherein the electronic control device is used for setting a processor, the processor is used for setting the path planning algorithm, and the path planning algorithm comprises the following steps of: 1, obtaining the position data of a charging seat, starting off by starting a mowing motor, searching a lawn natural boundary leftwards through the camera system, then walking forwards along the lawn natural boundary, and collecting forward images in real time; 2, obtaining the lawn natural boundary and positioning piles from the images by the processor, and walking forwards along a non-natural boundary formed by the natural boundary and the positioning piles until walking back to the position of the charging seat; 3, starting to search a mowing boundary by the mowing robot, starting to work along the mowing boundary, working towards the center of a lawn circle by circle; and 4, judging that the mowing task is finished when the mowing robot cannot find mowing boundary, shutting down the mowing motor, and walking back to the position of the charging seat.
Description
technical field [0001] The invention relates to a path planning algorithm for a mowing robot, belonging to the technical field of intelligent household appliances. Background technique [0002] At present, the maintenance of the lawn generally uses manual methods. In this way, the labor intensity of the staff is very high, especially when the weather is bad, they need to withstand the wind and sun, and they must also endure annoying noises. Therefore, people began to use automatic lawn mowing robots to replace people to do the hard work. The current lawn mowing robot is still in the initial stage of development, and there are several disadvantages: [0003] 1. To limit the working range of the mowing robot by laying geomagnetic wires, it not only needs to consume a lot of copper wires, but also needs to be constructed; [0004] 2. There is no path planning, and the random walking method is adopted, so the work efficiency is low; [0005] 3. The battery capacity is large...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): G05D1/02A01D34/00
Inventor 刘瑜程晓东
Owner 慈溪思达电子科技有限公司
Features
- R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
Why Patsnap Eureka
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Social media
Patsnap Eureka Blog
Learn More Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com