Torque coordinated control method and torque coordinated control system for hybrid electric vehicle
A hybrid electric vehicle and power system technology, applied in the field of hybrid electric vehicle torque coordination control method and system, can solve the problems of slow torque response speed, slippage, fuel consumption and emission increase, etc. The effect of improving safety and economy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
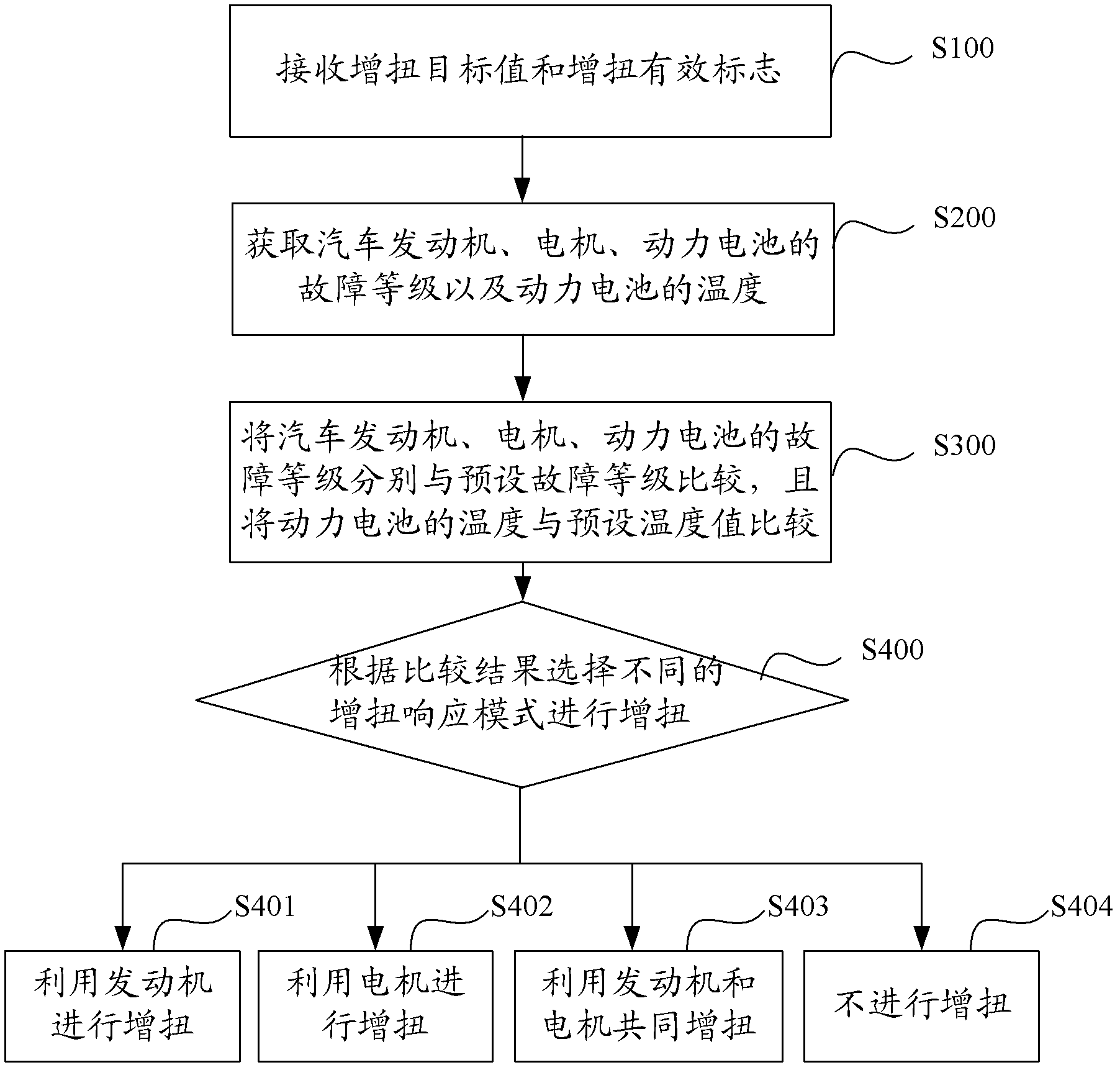
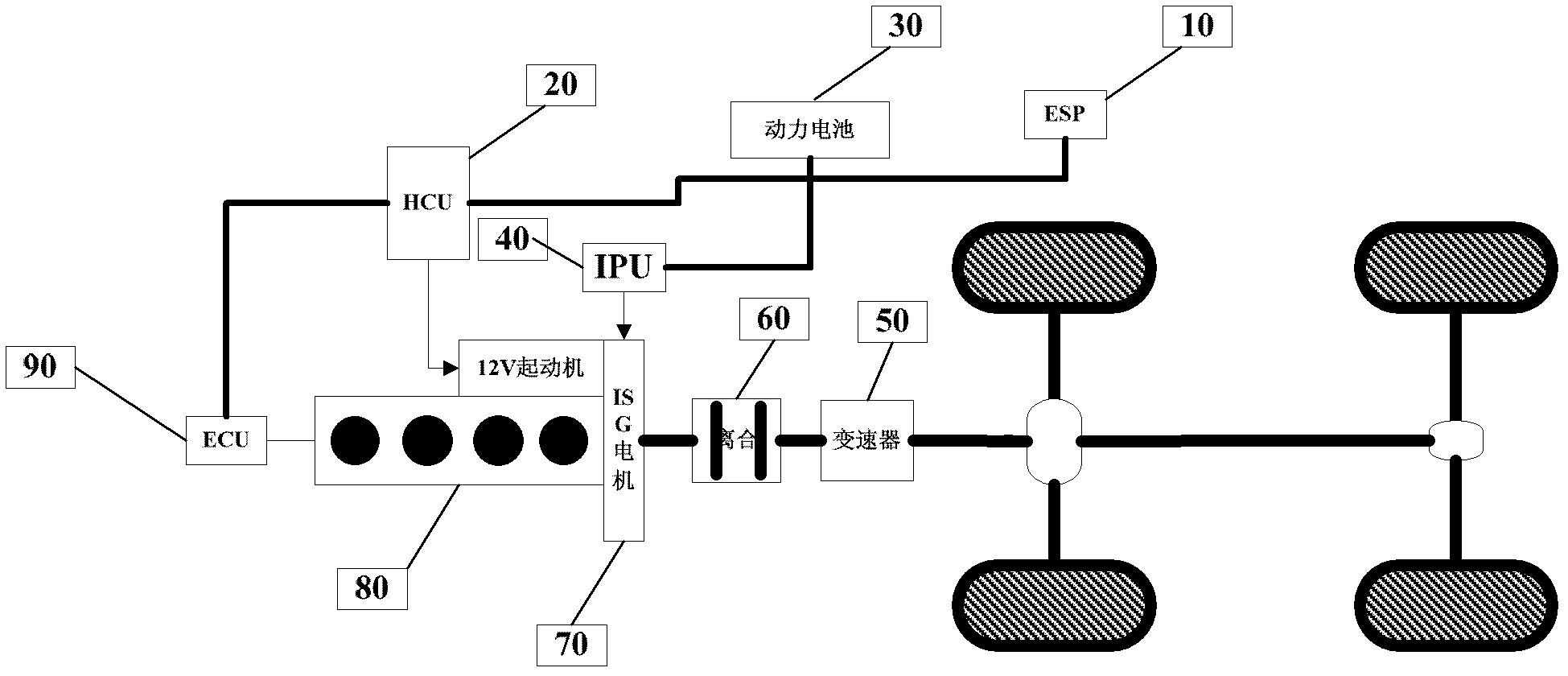
[0066] The motor failure level is 3, the battery failure level is 1, the engine failure level is 1, and the battery temperature is 20 degrees Celsius. According to the definition of the torque increase response mode conditions in the above method, the torque increase response mode in which the engine works alone should be used, and then the torque increase target value Tq_ESP_Increase and the torque increase valid flag Flag_Tq_Increase_Valide received from the bus are sent to the ECU, and the ECU controls The engine achieves torque increase, and at the same time sends a zero torque command to the IPU, and the motor does not generate torque during this process.
Embodiment 2
[0068] The motor fault level is 1, the battery fault level is 1, the engine fault level is 3, and the battery temperature is 20 degrees Celsius. According to the definition of the torque increase response mode conditions in the above method, the torque increase response mode in which the motor works alone should be used, and then the torque increase target value Tq_ESP_Increase and the torque increase valid flag Flag_Tq_Increase_Valide received from the bus are sent to the IPU, and the IPU controls The motor realizes the torque increase, and at the same time sends the torque command to the ECU during the normal sliding process, and the ECU still maintains the previous control mode during this process.
Embodiment 3
[0070] The motor failure level is level 1, the battery failure level is level 1, the engine failure level is level 1, and the battery temperature is 20 degrees Celsius. According to the definition of each torque increase response mode in the above method, the combined torque increase response mode should be used. First, the torque increase target value Tq_ESP_Increase and the torque increase valid flag Flag_Tq_Increase_Valide received from the bus are sent to the IPU, and the IPU controls the motor to realize the increase. After the preset time t, if there is still a torque increase demand, then the torque increase target value Tq_ESP_Increase and the torque increase valid flag Flag_Tq_Increase_Valide received from the bus are sent to the ECU, and at the same time a zero torque command is sent to the IPU, the motor does not Torque is generated again.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com