SINS (strap-down inertia navigation system)/SMANS (scene matching auxiliary navigation system)/TRNS (terrain reference navigation system) combined navigation method based on federated filtering and system
A technology of integrated navigation and federated filtering, applied in directions such as integrated navigators, can solve the problems of limited improved accuracy and high cost of inertial systems, and achieve the effects of improving accuracy, high fault tolerance, and correcting drift errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
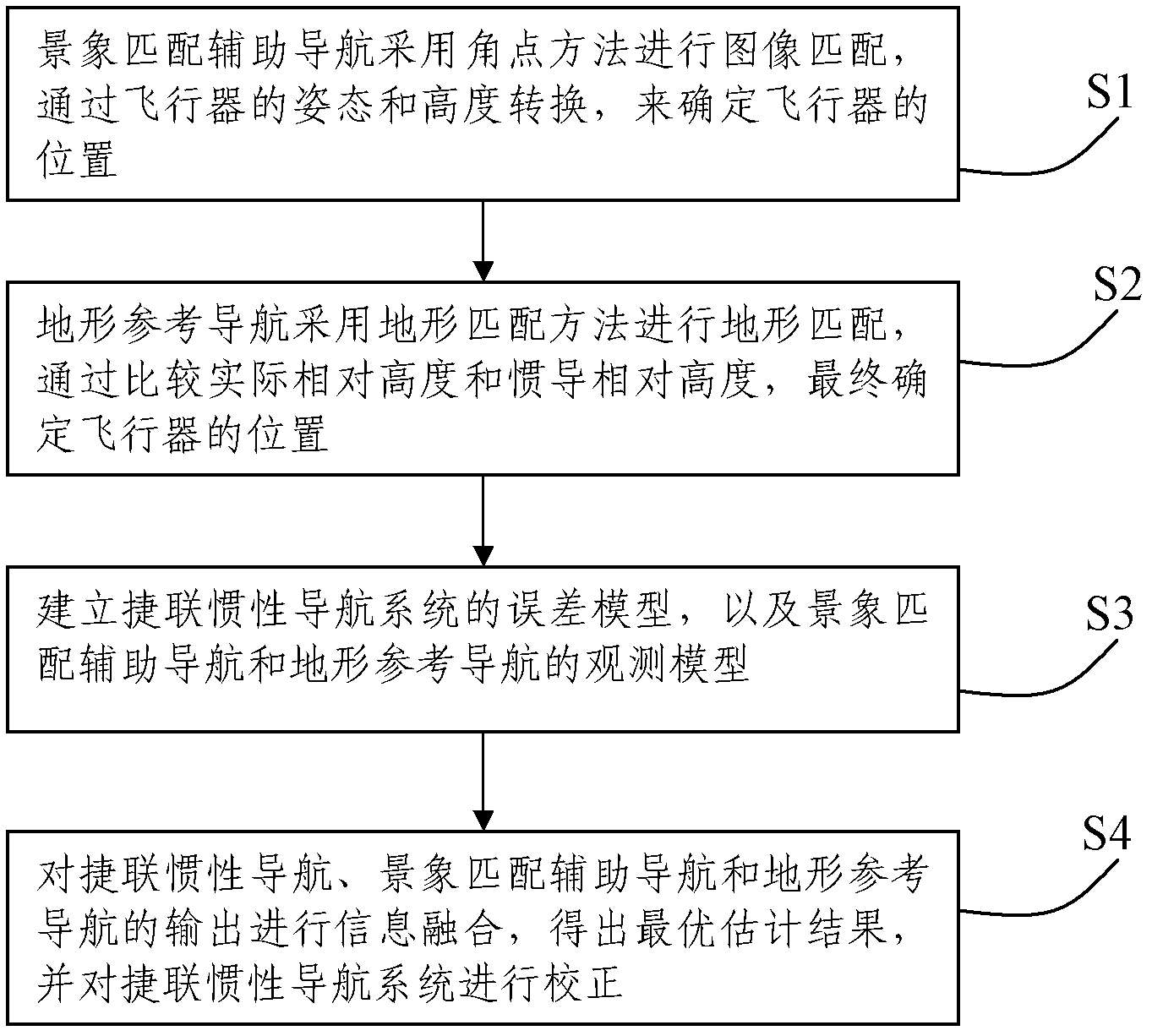
[0055] Such as figure 1 As shown, this embodiment records a SINS / SMANS / TRNS integrated navigation method based on federated filtering, which includes the following steps:
[0056] S1: Scene matching assisted navigation adopts corner point method for image matching, and determines the position of the aircraft through the conversion of the aircraft's attitude and altitude;
[0057] Such as figure 2 As shown, the step S1 specifically includes the following steps:
[0058] S11: Input the aerial image and the image of the area to be matched, and extract the feature points of the two images by using, for example, a method of approximating the Hessian matrix with a frame filter, and perform scale space representation and three-dimensional positioning of the image;
[0059] S12: Construct the descriptor vector of the interest point by determining the directional feature of the interest point, adopt the matching method based on the closest distance to the next closest distance to match the fea...
Embodiment 2
[0117] Such as Image 6 As shown, this embodiment records an integrated navigation system that implements the above integrated navigation method, including:
[0118] Atmospheric inertial navigation system, used to obtain and output inertial navigation position information;
[0119] The flight trajectory generator module is used to simulate the flight trajectory of the aircraft to obtain the position, speed and attitude information of the aircraft;
[0120] SINS / SMANS integrated navigation system, including:
[0121] An image sensor viewing zone and positioning parameter calculation module for calculating the viewing zone and positioning parameters of the image sensor on a computer based on the position information output by the atmospheric inertial navigation system;
[0122] The digital reference map database is used to obtain a suitable digital reference map according to the calculation result of the image sensor viewing area and the positioning parameter calculation module;
[0123] T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com