Optic fiber connection for a force sensing instrument
An optical fiber connection and force sensor technology, which is used in the parts of surgical instruments, the use of optical devices, instruments, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
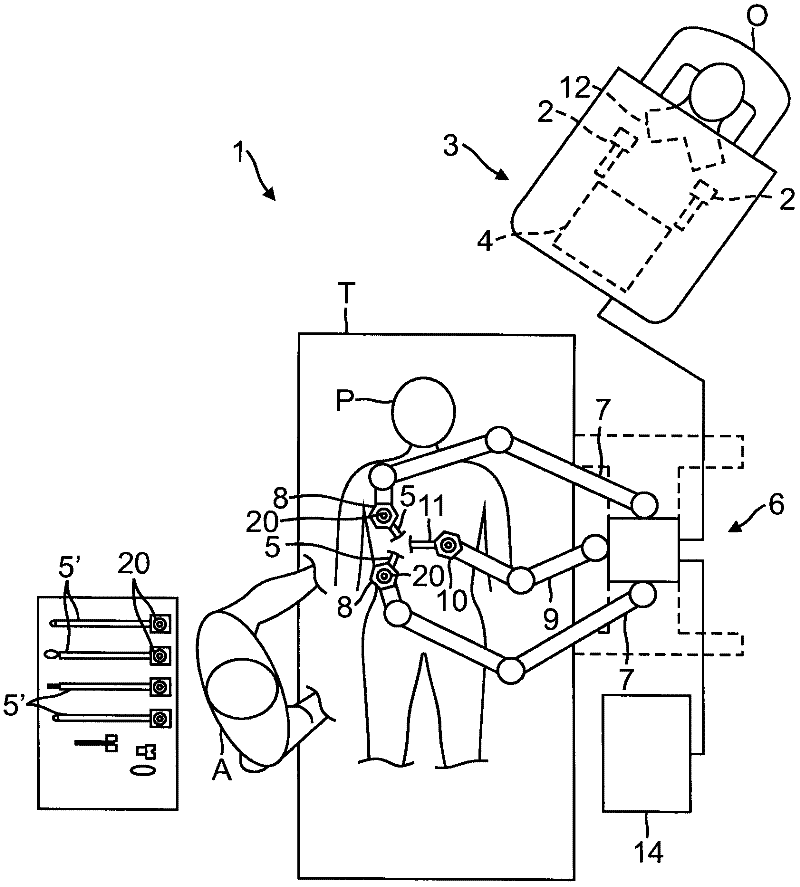
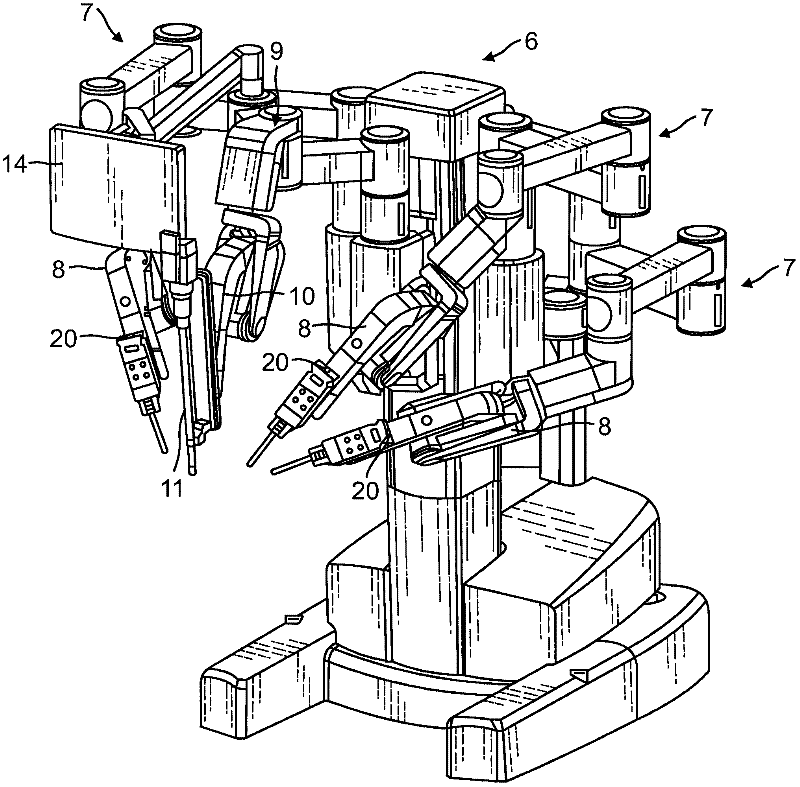
[0031] The present invention provides multi-component systems, devices and methods for sensing force during robotically assisted surgical procedures on a patient, including in particular open surgical procedures, neurosurgical procedures, and minimally invasive endoscopic procedures, such as laparoscopy , arthroscopy, thoracoscopy, and similar tests. The system and method of the present invention are highly beneficial as a telerobotic surgical system that allows a surgeon to manipulate surgical instruments from a location remote from the patient via servo mechanisms. To this end, the combined manipulator device or follower device of the present invention and attached surgical instrument are generally composed of equal degrees of freedom (e.g., 3 degrees of freedom for positioning, 3 degrees of freedom for orientation and grasping) degrees of freedom) driven by active parts, thus forming a remote monitoring system with force response or display. A description of a suitable fol...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com