Distributed manipulator control system
A control system and manipulator technology, applied in manipulators, manufacturing tools, etc., can solve problems such as cost burden, poor system stability, and complicated wiring of servo controllers, and achieve the effect of solving complicated wiring and reducing computing burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] A number of embodiments of the present invention will be disclosed in the following figures. For the sake of clarity, many practical details will be described together in the following description. It should be understood, however, that these practical details should not be used to limit the invention. In other words, in some embodiments of the invention, these details are unnecessary. In addition, for the sake of simplifying the drawings, some well-known structures and components are shown in a simple and schematic manner in the drawings.
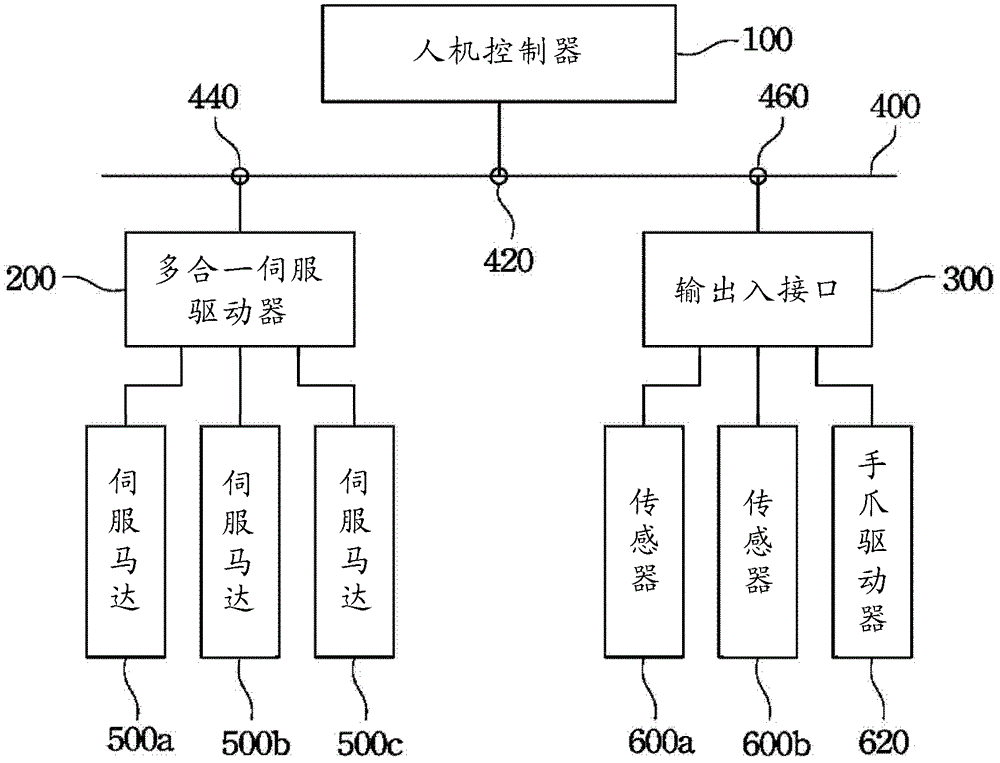
[0054] figure 1 A schematic diagram of a distributed manipulator control system according to an embodiment of the present invention is shown. As shown in the figure, in this embodiment, the distributed manipulator control system includes a bus 400, a man-machine controller 100, an all-in-one servo drive 200, three servo motors 500a, 500b and 500c, and an input-output interface 300 , two sensors 600a and 600b and a claw driver 620...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com