Throwing robot with changeable shape
A robotic and variable technology, applied in the field of robotics, can solve problems such as narrow observation range, robot damage, and low camera line of sight height, and achieve the effect of improving sight range, flexible movement ability, and expanding reconnaissance space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be specifically introduced below in conjunction with the accompanying drawings and specific embodiments.
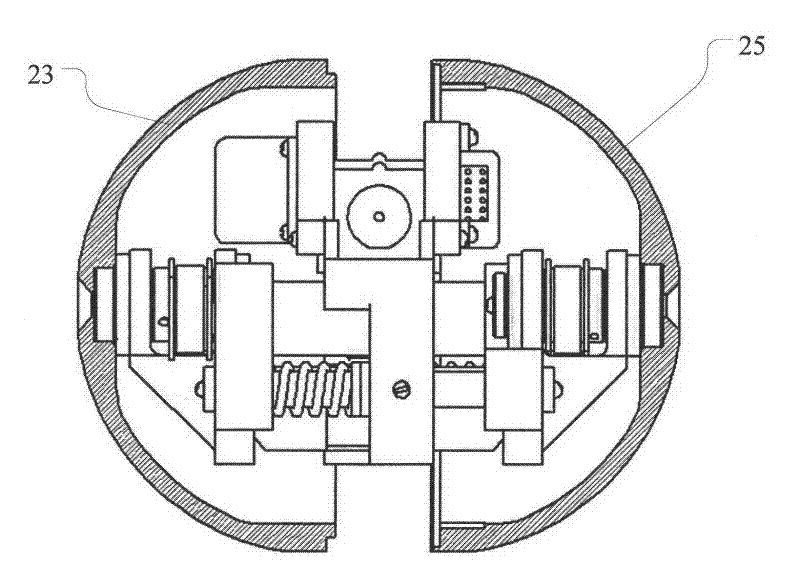
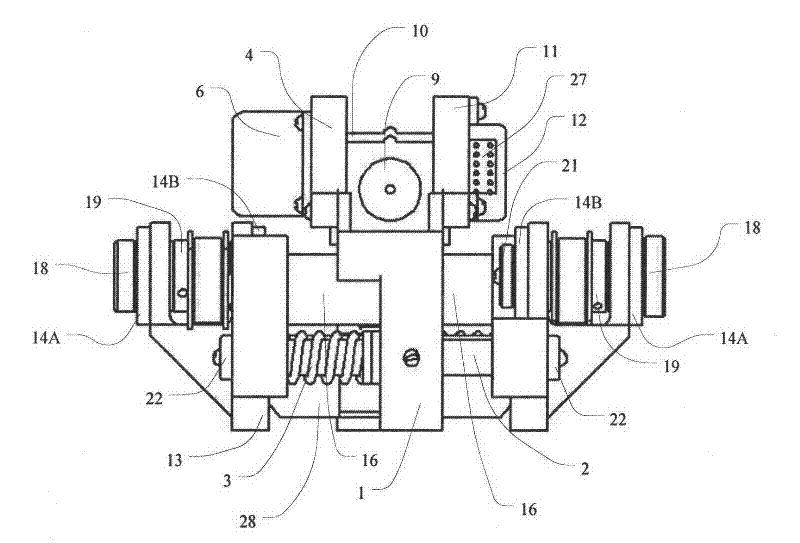
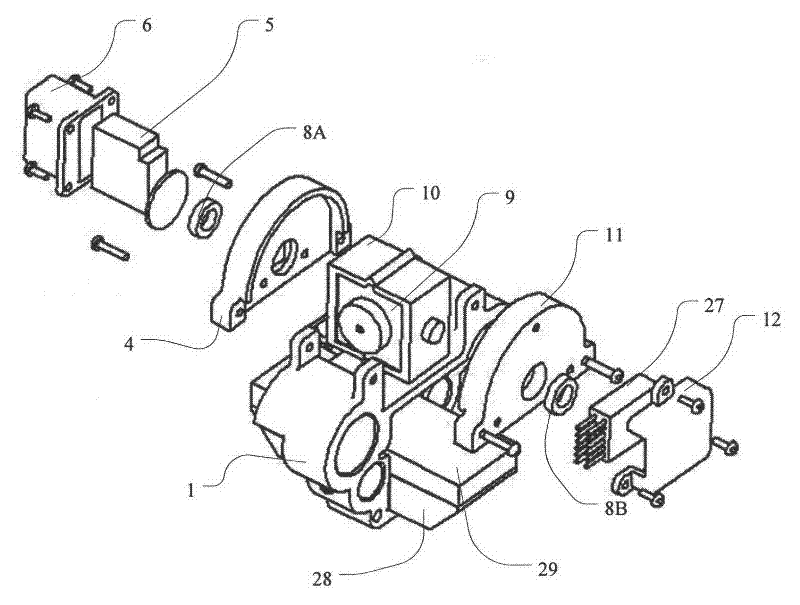
[0037] refer to figure 1 , figure 2 As shown, a variable shape throwing robot of the present invention mainly includes three parts: a shell part, an actuator part, a camera part, and a power control part; In order to make the field of view of the camera 9 good, the camera part is fixed above the actuator part.
[0038] Such as figure 1 As shown in , wherein the shell part is two half-shells 23, 25, they should be left-right symmetric, in order to enable them to rotate and travel under the drive of the wheel shaft 18 after they are opened, the two half-shells 23, 25 are all axisymmetric The semi-closed structure of the shape, its axis of symmetry is arranged horizontally and coincides with the axis of the wheel shaft 18. As a preferred solution, the two half-shells 23, 25 are hemispherical shells. In addition, they can also be semi-ellip...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com