Coal mine disaster relief robot navigation system and method based on information fusion
A navigation system and robot technology, applied in navigation, surveying and mapping and navigation, navigation computing tools, etc., to achieve the effects of light weight, enhanced reliability, and improved convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The following implementation examples will further illustrate the present invention, and implementation examples should not be considered as limiting the scope of the present invention. The working mode of the present invention will be described in detail below in conjunction with the accompanying drawings and implementation examples.
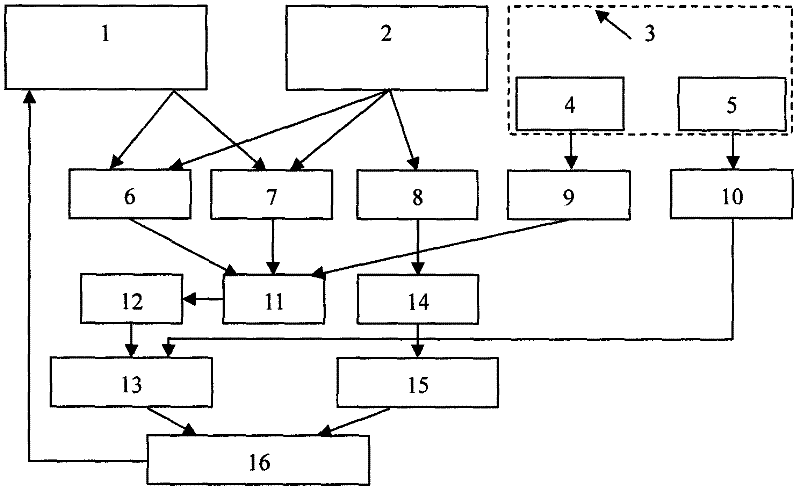
[0048] Such as figure 1 Shown is a structural block diagram of a multi-sensor fusion navigation system and method for a coal mine disaster relief robot.
[0049] The ultrasonic module 1 uses the time difference between the transmitted wave and the received wave to measure the distance.
[0050] The measurement formula is: Among them, d is the distance between the robot and the measured obstacle, C is the propagation speed of the sound wave in the medium, and T is the time difference between the transmitted wave and the received wave.
[0051] Three pairs of ultrasonic transducers are used, which are respectively placed in the front, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com