Reverse-quadrilateral bisectional track robot
A crawler robot and quadrilateral technology, applied in tracked vehicles, motor vehicles, transportation and packaging, etc., can solve problems such as insufficient flexibility, and achieve the effects of improving obstacle-surpassing ability, flexible and changeable linkage mechanism, and high track stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be further described below in conjunction with the accompanying drawings.
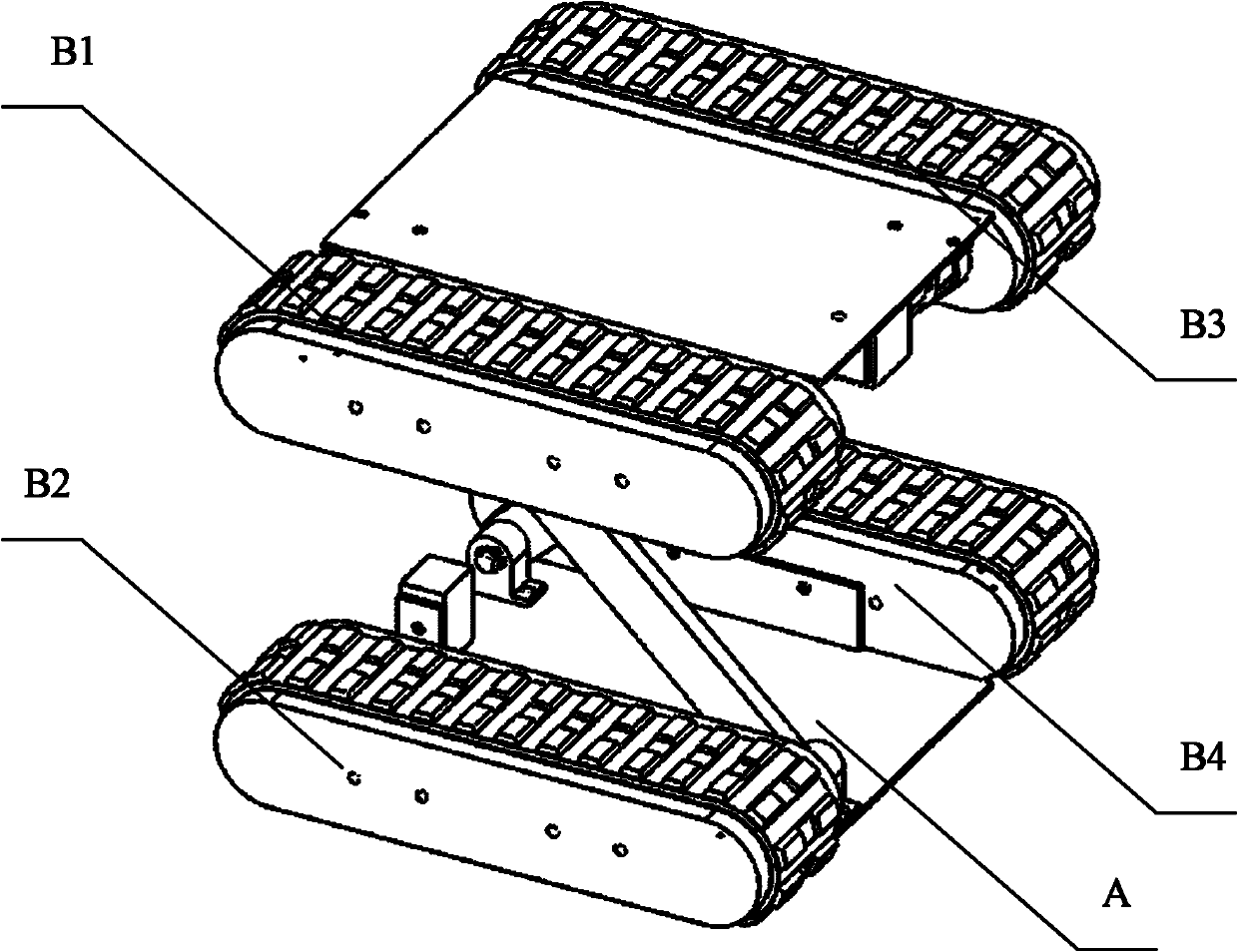
[0056] A reverse quadrilateral two-section crawler robot, such as figure 1 As shown, the crawler robot includes a connecting rod module A, a first crawler module B1, a second crawler module B2, a third crawler module B3, and a fourth crawler module B4, and through the connecting rod module A, the first crawler module B1, the second crawler module The second crawler module B2, the third crawler module B3, and the fourth crawler module B4 are connected to form a reverse quadrilateral double-section crawler robot.
[0057] The connection between the above modules:
[0058] Through the two through holes on the track side plates of the first crawler module B1 and the third crawler module B3 and the two corresponding through holes on both sides of the first car body 1 of the connecting rod module, use bolts and nuts to connect the second A crawler module B1 and a third cra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com