Hydraulically-driven four-foot robot
A four-legged robot, driven technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problem of the uneven output torque and rotation speed of the joints of the legged robot, which hinders the design idea of the joints of the hydraulically driven legged robot, and the unfavorable leg type. Problems such as the realization of robot motion, to achieve the effect of clear motion principle, convenient motion realization, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
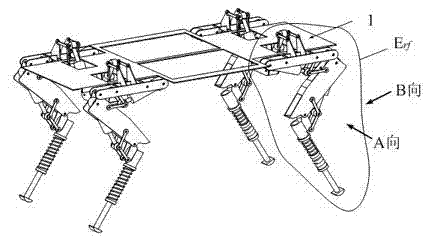
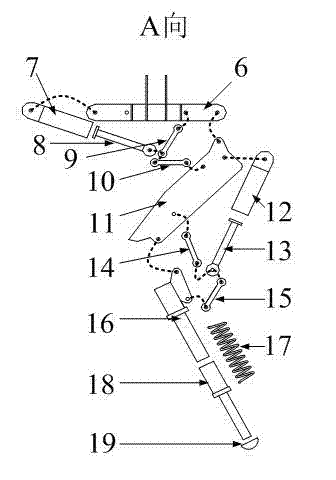
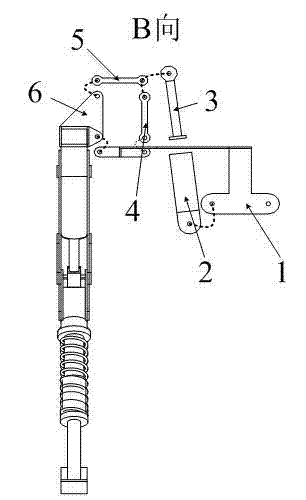
[0032] combine Figure 1 to Figure 14 , the present embodiment is a hydraulically driven quadruped robot structure design, including: a body 1 and four legs mounted on the body; wherein each leg has the same structure. Wherein each leg all comprises: the first hydraulic cylinder body 2, the first hydraulic cylinder telescopic rod 3, the first parallelogram I connecting rod 4, the first parallelogram II connecting rod 5, the hip 6, the second hydraulic cylinder Body 7, second hydraulic cylinder telescopic rod 8, second parallelogram I connecting rod 9, second parallelogram II connecting rod 10, thigh 11, third hydraulic cylinder body 12, third hydraulic cylinder telescopic rod 13, third Parallelogram I connecting rod 14, the third parallelogram II connecting rod 15, shank 16, spring 17, telescopic foot 18, sole 19.
[0033] Such as figure 2 a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com