A Distributed Multi-robot Synchronous Flocking Control Method
A technology of multiple robots and control methods, applied in the field of intelligent robots, to solve the collision problem and ensure the effect of connectivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be described in detail below in conjunction with the accompanying drawings.
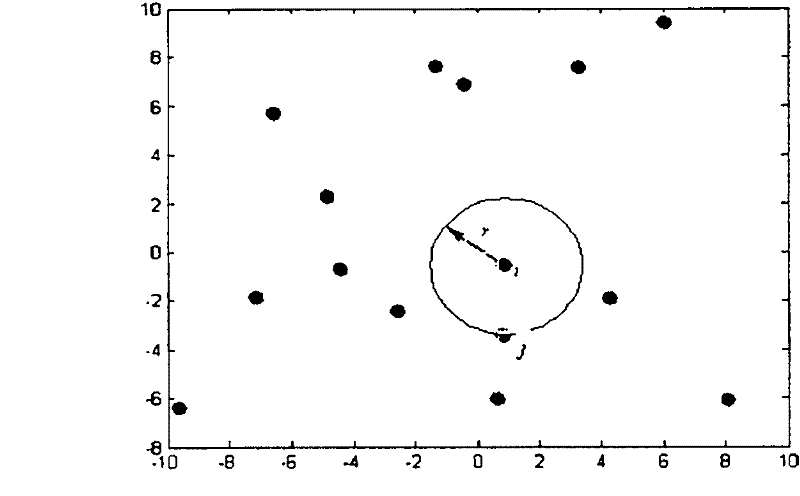
[0026] Neighborhood map of the robot swarm is shown as figure 1 As shown, take a group consisting of N robot individuals (such as 15) in two-dimensional space, regardless of the size of each robot individual, assume that the individual is a particle, the position of individual i is randomly generated, and each individual The perception radius (that is, the neighborhood radius) is r, if the distance between individual i and individual j is less than or equal to r, then j and i are neighbors to each other, and they can interact with each other. Connect an edge to form a neighbor graph. It should be noted that the position of each individual will change over time according to the role of the position control operator and the speed direction control operator, that is, the neighbors of each individual will also change over time. Variety.
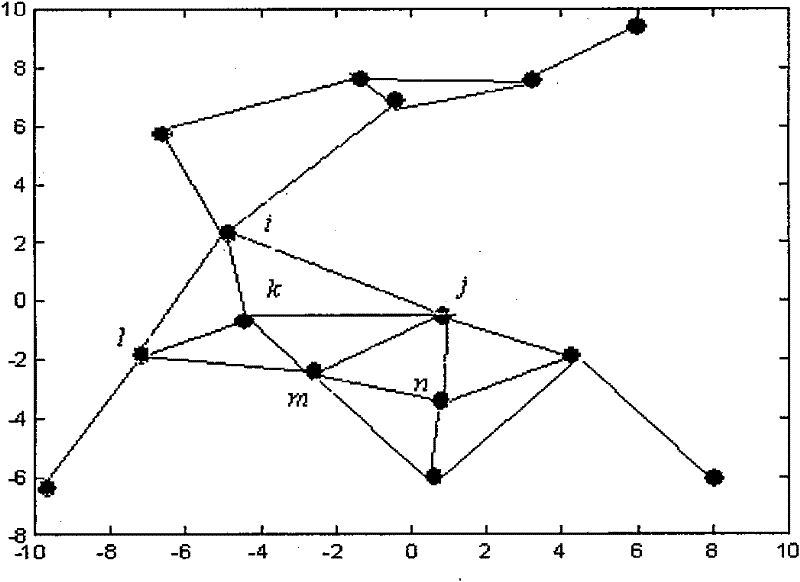
[0027] The connectivity graph ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com