Dual-redundancy attitude control system and debug method of coaxial unmanned helicopter
An unmanned helicopter, attitude control technology, applied in attitude control and other directions, can solve the problems of fixed control mode, close circuit coupling, and complex debugging.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
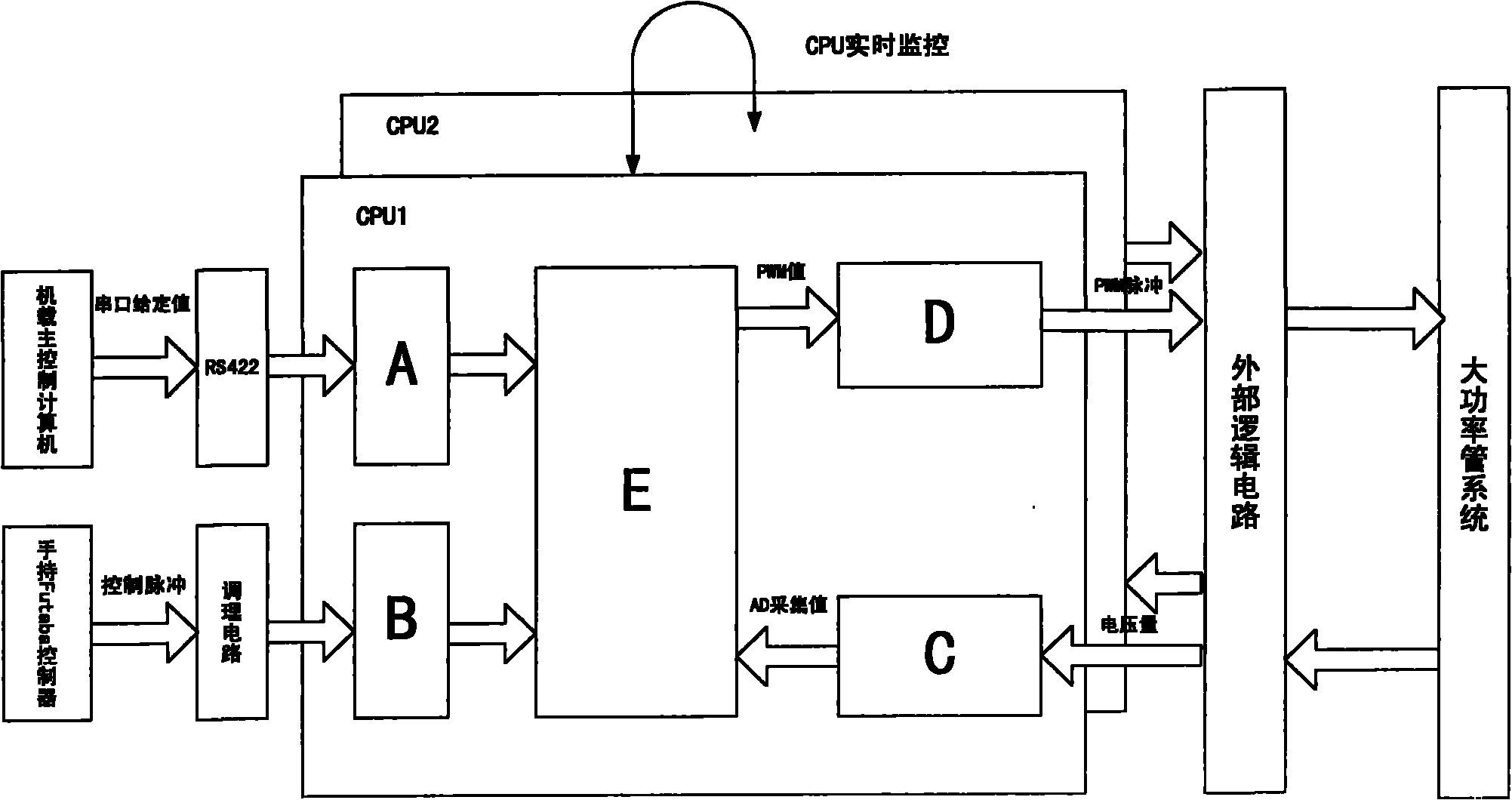
[0063] (1) see figure 1 , a kind of coaxial unmanned helicopter dual-redundancy attitude control system of the present invention, it is made up of parts such as serial port communication module A, PCM decoding module B, AD acquisition module C, PWM output module D and CPU control module E. The logical relationship between them is: serial port communication module A, PCM decoding module B, and AD acquisition module C are used as system input, and the improved digital PID control is performed by the CPU control module E, which is output by the PWM output module D in the form of PWM pulses. With the cooperation of simple peripheral logic circuits, the control of the subsequent high-power tubes is realized; at the same time, the main functions of the CPU control module E also include mutual monitoring, backup and switching of dual CPUs, thereby realizing "dual redundancy" control.
[0064]Described serial port communication module is: realize by the serial port controller (UART un...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com